Maglev: Magnetisk svævende tog
Maglev-tog bruger magnetisme til at svæve over de spor, de kører på. De er hurtigere, mere effektive og mere miljøvenlige end moderne tog med hjul. Det kan være, at en dag snart vil maglev-teknologi være almindelig i hele verden. Denne artikel gennemgår historikken for disse tog, hvordan de fungerer, samt deres fordele og ulemper. Den diskuterer også vigtigheden af elektroteknik i udviklingen af maglev, og hvordan elektroteknikere kan gøre denne teknologi til den næste transportrevolution.
Introduktion
Forestil dig et tog uden hjul. I stedet for at rulle langs sporet svæver det stille over og glider glat fra oprindelse til destination uden nogensinde at røre ved en skinne. Dette kan lyde som science fiction, men forekomster af denne teknologi findes allerede flere steder i verden. De er kendt som maglev-tog (afledt af udtrykket magnetisk levitation). Disse futuristiske lokomotiver tilbyder mange nye og spændende muligheder for rejser. De har potentialet til at være hurtigere, sikrere og mere energieffektive end konventionelle transportsystemer. Selvom sådanne tog er få fra nu af, er de et knudepunkt for forskning inden for elektroteknik. Som et resultat kan maglev være almindeligt hurtigere, end du tror.
Maglevs historie
De grundlæggende ideer bag maglev-teknologien kan spores tilbage til det tidlige 20. århundrede. Meget arbejde gik i at lægge grundlaget for disse tog, herunder udvikling af elektriske motorer og forskning inden for magnetisme. Et par videnskabsmænd, nemlig Robert Goddard og Emile Bachelet, turde endda foreslå et køretøj, der ville flyde ved hjælp af magneter (Yadav, 2013). I 1934 fik en tysk mand ved navn Hermann Kemper patent på det første koncept om et magnetisk, svævende tog (Yadav, 2013). Først i 1960’erne begyndte ideen virkelig at manifestere sig. På dette tidspunkt begyndte Tyskland og Japan at undersøge potentialet i maglev. I løbet af 70’erne og 80’erne gjorde begge lande store fremskridt med at udvikle disse tog. Tyskland byggede og testede en række prototype maglev-systemer og kaldte deres design TransRapid (figur 1). Togene opnåede hastigheder på over 250 km / t på testsporet (Luu, 2005). Japan testede også to serier af deres egne designs, kaldet ML-500 og senere MLU. Deres tog var i stand til at overstige 300 km / h (Luu, 2005). 
Figur 1
Transrapid på testcenter i Tyskland nær Bremen. Kilde: © Stahlkocher / CC BY-SA 3.0
Japan fortsatte udviklingen af sin maglev-teknologi i 90’erne og derefter. De testede en ny serie, kaldet MLX, som brød i 2003 (563 km / t) i 2003 (Yadav, 2013). Der er ikke etableret kommercielle linjer i landet, men de udfører stadig forskning. I Tyskland blev der foreslået en kommerciel TransRapid-linje, der forbinder Berlin og Hamborg i 1992. I 2000 lukkede regeringen imidlertid projektet (Luu, 2005). Ikke alt var dog tabt, da kineserne tog opmærksomhed og bestilte tyskerne at bygge et TransRapid-tog i Shanghai. Shanghai Maglev (figur 2), der var resultatet af denne satsning, er nu det eneste højhastighedstog i kommersielt brug. Det transporterer passagerer en afstand på 30 km på 8 minutter og når en tophastighed på over 250 km / h (Coates, 2004). Således er Kina hurtigt blevet en stor aktør på det verdensomspændende maglev-marked. Landet planlægger at fortsætte udviklingen af sin maglev-infrastruktur. 
Figur 2
Shanghai Maglev forlader Pudong International Airport, med jernbanekortet Shanghai Transit Map, der viser ruten til Longyang Road. Collagekilder: © Alex Needham / Public Domain and Metropedia
Hvordan fungerer det?
Maglev-tog har ikke hjul eller skinner. Som vist i figur 3 har de føringsveje, og de flyder ned ad disse føringsveje uden nogensinde at røre ved dem. 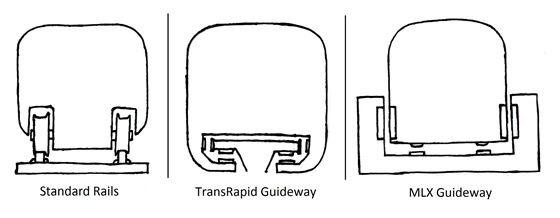
Figur 3
Sammenligning af hjulskinne versus føringsveje. Kilde: Forfatter, afledt af Lee (2006).
Der er tre vigtige dele for at opnå maglev-funktionalitet: levitation, fremdrift og vejledning (som vist nedenfor). 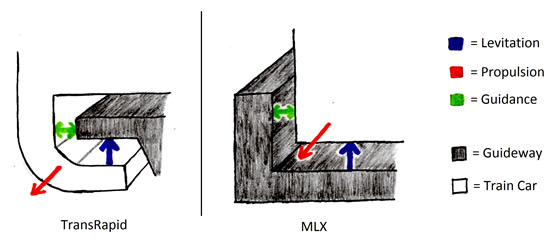
Figur 4
Levitation, fremdrift og vejledning i maglev. Kilde: Forfatter, afledt af Lee (2006).
Levitation
Levitation er togets evne til at forblive suspenderet over sporet. Der er to vigtige typer af levitationsteknologi:
- Elektromagnetisk suspension (EMS): EMS (figur 5) bruger den attraktive kraft af elektromagneter placeret på føringsvejen og på toget for at opnå levitation.Fordelene ved denne metode er, at den er enklere at implementere end elektrodynamisk suspension (diskuteret nedenfor), og at den opretholder levitation ved nul hastighed. Ulemperne er, at systemet i sagens natur er ustabilt. Ved høje hastigheder bliver det vanskeligt at opretholde den korrekte afstand mellem tog og føringsvej. Hvis denne afstand ikke kan holdes, vil toget undlade at svæve og stoppe slibende. For at tage højde for dette kræver EMS komplekse feedback-kontrolsystemer for at sikre, at toget altid er stabilt (Lee, 2006).
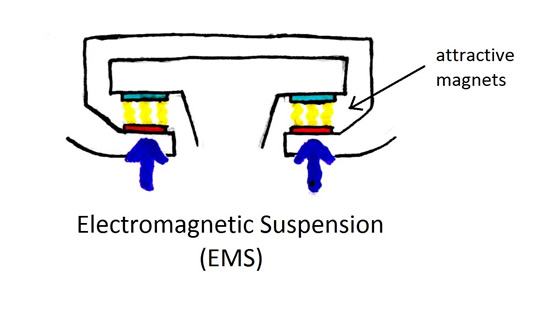
Figur 5
Elektromagnetisk suspension (EMS). Bruger attraktive magnetiske kræfter. Kilde: Forfatter, afledt af Lee (2006).
- Elektrodynamisk suspension (EDS): EDS (figur 6) bruger den frastødende kraft af (superledende) magneter placeret på føringsvejen og på toget til opnå levitation. Magneterne bevæger sig forbi hinanden, mens toget kører og genererer den frastødende kraft. Fordelene ved denne metode er, at den er utrolig stabil ved høje hastigheder. Det er ikke et problem at opretholde den korrekte afstand mellem tog og guideway (Lee, 2006). Ulemperne er, at der skal bygges tilstrækkelig hastighed op for at toget overhovedet kan svæve. Derudover er dette system meget mere komplekst og dyrt at implementere.
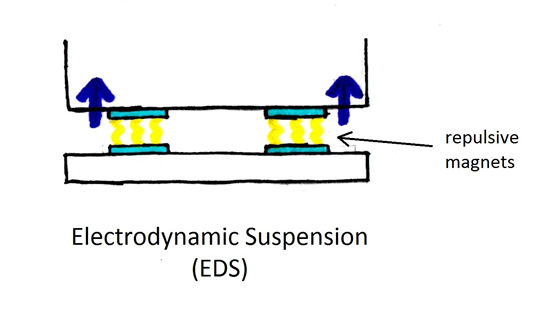
Figur 6
Elektrodynamisk suspension (EDS). Bruger frastødende magnetiske kræfter. Kilde: Forfatter, afledt af Lee (2006).
Propulsion
Propulsion er den kraft, der driver toget fremad. Maglev bruger en elektrisk lineær motor for at opnå fremdrift. En normal elektrisk roterende motor bruger magnetisme til at skabe drejningsmoment og dreje en aksel. Det har et stationært stykke, statoren, der omgiver et roterende stykke, rotoren. Statoren bruges til at generere et roterende magnetfelt. Dette felt inducerer en rotationskraft på rotoren, som får den til at dreje. En lineær motor er simpelthen en udrullet version af dette (se figur 7). Statoren lægges fladt, og rotoren hviler over den. I stedet for et roterende magnetfelt genererer statoren et felt, der bevæger sig ned ad sin længde. På samme måde oplever rotoren i stedet for en roterende kraft en lineær kraft, der trækker den ned i statoren. Således producerer en elektrisk lineær motor direkte bevægelse i en lige linje. Denne motor kan dog kun producere en kraft, mens rotoren er over statoren. Når rotoren har nået slutningen, holder den op med at bevæge sig. 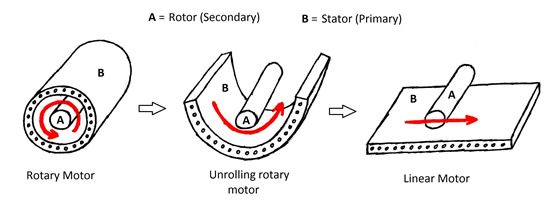
Figur 7
Roterende motor versus lineær motor. Kilde: Forfatter, afledt af Lee (2006).
Når man beskriver en lineær motor, er standarden at bruge udtrykket “primær” i stedet for “stator” og “sekundær” i stedet for “rotor.” I maglev-tog er det sekundære fastgjort til bunden af togvognene, og det primære er i føringsvejen. Så et magnetfelt sendes ned ad føringsvejen, og det trækker toget bagefter. På en måde kan hele længden af et maglev-spor betragtes som en del af togets motor. Systemet, der hidtil er beskrevet, er en lineær induktionsmotor (LIM). Det kaldes så, fordi magnetfeltet i det primære inducerer et magnetfelt i det sekundære. Det er interaktionen mellem det originale felt og det inducerede felt, der får sekundæret til at blive trukket med. I denne konfiguration hænger sekundæret dog altid noget bag det bevægelige felt i det primære. Denne forsinkelse er en kilde til energi og tab af hastighed. I en lineær synkronmotor (LSM) fjernes forsinkelsen ved at fastgøre permanente magneter til den sekundære. Fordi sekundærsystemet nu producerer sit eget stationære magnetfelt, bevæger det sig ned ad det primære synkroniseret med det bevægelige felt – deraf navnet på denne motorvariant (Gieras, 2011). Fordi LSM er hurtigere og mere effektive, er de den valgte motor i højhastighedstog (Lee, 2006).
Vejledning
Vejledning er det, der holder toget centreret over vejvej. Til højhastigheds maglev bruges afstødende magnetiske kræfter til at opnå dette (figur 8). I TransRapid er der to elektromagnetiske skinner placeret på toget mod hver side af føringsvejen. Disse skinner forhindrer toget i at bevæge sig for langt fra kurs (Lee, 2006). I MLX er vejledning koblet til levitationssystemet. Levitationsskinnerne på begge sider af toget er forbundet med hinanden. Gennem denne forbindelse, når toget bevæger sig tættere på den ene side, induceres en genopretningskraft, der skubber det tilbage mod midten. Således er MLX både leviteret og styret på samme tid (Lee, 2006). 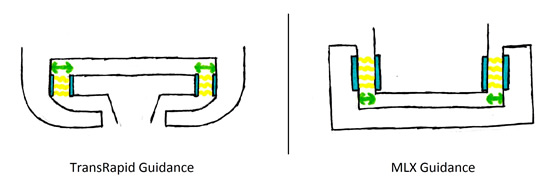
Figur 8
Vejledningssystem for Transrapid og MLX. Begge bruger frastødende magneter. Kilde: Forfatter, afledt af Lee (2006).
Fordele ved Maglev
Den mest åbenlyse attraktion ved maglevtog er, at de kan rejse hurtigere end traditionelle togtog. Den eneste kommercielle højhastighedsmaglev, Shanghai Maglev, er nu det hurtigste tog, der findes.Den kører over 50 km / t hurtigere end den hurtigste højhastighedstogskinne (320 km / t Hayabusa, 2013). Og det er kun den første. Manglen på friktion mellem toget og føringsvejen fjerner mange grænser, der binder traditionelle tog. Maglev bliver kun hurtigere herfra (Luu, 2005). Der er andre, mere subtile kvaliteter, der også gør maglev attraktive:
- Lang levetid: Konventionelle hjul og skinner undergår meget stress over tid. De skal udskiftes og repareres med jævne mellemrum for at forblive funktionelle. I maglev er der ingen kontakt mellem tog og føringsvej, så der er væsentligt mindre slitage. Levetiden for maglev-dele er passende meget længere på grund af dette faktum (Powell, 2003). Økonomisk er dette et ganske incitament, da reparation og vedligeholdelse er dyre og tidskrævende aktiviteter.
- Sikkerhed: Det kan virke kontraintuitivt, at disse tog er sikrere, da de kører så meget hurtigere end deres hjul modparter. Det er ikke desto mindre sandt. Maglev-tog er næsten umulige at afspore (Luu, 2005). Det ville kræve noget som fuldstændig sammenbrud af føringsvejen for at adskille et tog fra dets spor. Derudover er vejret ikke meget af et problem. Da togene ikke er afhængige af friktion for bevægelse, forårsager sne, is og regn ringe eller ingen effekt (Luu, 2005). Endelig er det let at hæve føringsvejene. Hvis togene kører på spor ti meter over jorden, er der en mindre chance for kollision med en genstand på stien (Luu, 2005).
- Energieffektivitet: En anden fordel ved levitation er, at disse tog mister ikke energi til friktion. Dette giver dem en fordel i effektivitet (Wang 2010). Energiforbrug er vigtigt for et transportsystems succes. Meget af driftsomkostningerne går til at betale for strøm. Derfor er denne kant i effektivitet meget vigtig. Imidlertid er maglev-tog mere effektive, men de er i øjeblikket ikke væsentligt mere effektive end moderne højhastighedstog. De har dog potentialet til at være langt overlegne i denne kategori.
- Miljøpåvirkninger: Maglev-tog kan dreje tættere end højhastighedsskinner. Dette gør det muligt at bygge guidebaner, som kan navigere i terræn meget bedre (Wang 2010). Stierne kan konstrueres til at have så lidt effekt på miljøet som muligt. Vejveje optager også mindre areal end skinner (Wang 2010). Dette reducerer miljøpåvirkningen yderligere. Og som nævnt før hæves vejledninger let fra jorden (Luu, 2005). Planter og dyr både er sikrere med toget, der kører over dem, og tønner ikke lige ved siden af dem.
- Støjforurening: Når man overvejer et transportprojekt, er støj (inden for rimelige grænser) ikke så stor en bekymring som økonomi eller sikkerhed. Dog betragtes støjreduktion stadig som et positivt træk. Maglev-tog er mere støjsvage end nutidige tog, så dette er et andet punkt i deres favør (Wang, 2010).
Ulemper ved Maglev
Selvom der er mange ulemper, er der er stadig grunde til, at der ikke bygges maglevtog overalt. Måske er den største årsag, at maglev-guider ikke er kompatible med eksisterende jernbaneinfrastruktur. Enhver organisation, der forsøger at implementere et maglev-system, skal starte fra bunden og bygge et helt nyt sæt spor. Dette indebærer en meget høj initialinvestering (Coates, 2004). Selvom føringsveje koster mindre end skinner over tid (Powell, 2003), er det svært at retfærdiggøre at bruge så meget på forhånd. Et andet problem er, at maglev-tog kører hurtigt, men de rejser måske ikke ret hurtigt nok. Lande med allerede eksisterende højhastighedsskinner ønsker ikke at bruge milliarder af dollars på at implementere et system, der kun er marginalt bedre end den eksisterende løsning. Markedet for disse tog er bare ikke meget stort i øjeblikket. Det er svært at bestride, at disse tog er bedre end standard. Uanset hvad skal der gøres mere arbejde, før det er værd at implementere dem over hele verdenen.
Elektroteknik i Maglev
Lige siden dampmaskinen har tog traditionelt været inden for maskiningeniørers område. . De var alle motorer og aksler, hjul og motorer. Imidlertid har indførelsen af maglev-teknologi brudt denne tradition. Udvikling af disse tog har krævet input fra en række forskellige felter bortset fra maskinteknik, herunder fysik og kemi. Men vigtigst af alt har det bragt elektriske ingeniører til bordet. Fra begyndelsen har elektriske ingeniører bidraget væsentligt til udvikling af maglev-teknologi. Eric Laithwaite, en elektroingeniør, udviklede den første lineære induktionsmotor, en vigtig og nødvendig forløber for maglev-tog. Hermann Kemper, som mange mener er far til maglev, var også en elektroingeniør. Tyske og japanske elingeniører arbejdede for at etablere maglev-programmerne i deres respektive nationer.Og i dag gør elingeniører teknologien bedre og bedre, så den kan appellere til lande over hele verden. Maglev-tog har overraskende få bevægelige dele. De handler alle om elektriske strømme, magneter og trådsløjfer. Nogle vigtige emner i marken er elektromagnetiske felter og bølger, kredsløbsteori, feedbackkontrolsystemer og energiteknik. Alle disse falder ind under elektroteknikernes ekspertise. Derfor er det elektriske ingeniører, der er nødvendige for at løse de største problemer, som denne teknologi står over for. Togene skal gøres hurtigere og mere energieffektive. Alt imens de skal holdes inden for grænserne for sikkerhed. Føringsvejene skal gøres billigere, lettere at implementere og måske mere kompatible med eksisterende skinner. Kontrolsystemerne skal gøres fejlfri. Alle disse spørgsmål og mere opfordrer en elektrotekniker til at løse deres svar.
Maglevs fremtid
Maglev-teknologien giver et stort løfte for fremtiden. Det har potentialet til at være en billigere, hurtigere, sikrere og grønnere transportform end vi har i dag. Og ved hjælp af nogle elektriske ingeniører bliver det alle disse ting. Der er mulige anvendelser til denne teknologi i alt fra offentlig transport til langrend til langrendsture. Der er endda forslag om at bygge lange underjordiske rør, suge luften ud af rørene og placere maglev-tog inde i dem. I denne indstilling ville der næsten ikke være vindmodstand, så et tog kunne let nå hastigheder, der overstiger lydhastigheden (Thornton, 2007). Selvom det kan tage lang tid, før denne teknologi bliver udbredt, er det vanskeligt at benægte, at den på et tidspunkt vil være udbredt. Fordelene er for svære at ignorere. Fra nu af er der kun ét kommercielt maglevstog i brug, og det har allerede formørket alt, hvad der er kommet før det. Hvordan vil denne teknologi udvikle sig og forbedre sig, når vi bevæger os ind i fremtiden? Det vil tiden vise. Men det er meget sandsynligt, at vi nu står ved en transportrevolution. For det første glæder jeg mig til at glide over landskabet ved 300 mph i en svævende magnetkasse.
Bibliografi
Foreslåede links
Se også
- Autonome køretøjer
- Elektriske batterier til vedvarende energi
- Intelligent infrastruktur