Maglev: Magneettiset levitaattojunat
Maglev-junat levittävät magneettisesti kiitotiensä yläpuolella. Ne ovat nopeampia, tehokkaampia ja ympäristöystävällisempiä kuin nykyaikaiset pyörät. Voi olla, että jonain päivänä maglev-tekniikka on yleistä kaikkialla maailmassa. Tässä artikkelissa tarkastellaan näiden junien historiaa, toimintaa, sekä niiden etuja ja haittoja. Siinä keskustellaan myös sähkötekniikan merkityksestä maglevin kehittämisessä ja siitä, miten sähköinsinöörit voivat tehdä tästä tekniikasta seuraavan kuljetusvallankumouksen.
Johdanto
Kuvittele juna ilman pyöriä. Sen sijaan, että se liikkuu radalla, se kelluu hiljaa yllä ja liukuu tasaisesti lähtöpaikasta määränpäähän koskematta kiskoon. Tämä saattaa kuulostaa tieteiselta fiktiolta, mutta tätä tekniikkaa esiintyy jo monissa paikoissa maailmassa. Ne tunnetaan maglev-junina (johdettu termistä magneettinen levitaatio). Nämä futuristiset veturit tarjoavat monia uusia ja jännittäviä matkustamismahdollisuuksia. Heillä on mahdollisuus olla nopeampi, turvallisempi ja energiatehokkaampi kuin perinteiset kuljetusjärjestelmät. Vaikka tällaisia junia on tällä hetkellä vähän, kaukana toisistaan, ne ovat sähkötekniikan tutkimuksen kasvualusta. Tämän seurauksena maglev voi olla yleistä aikaisemmin kuin luulisi.
Maglevin historia
Maglev-tekniikan taustalla olevat ajatukset voidaan jäljittää 1900-luvun alkupuolelle. Paljon työtä tehtiin näiden junien perustan luomiseen, mukaan lukien sähkömoottorien kehittäminen ja magnetismin tutkimus. Muutamat tutkijat, nimittäin Robert Goddard ja Emile Bachelet, uskaltivat jopa ehdottaa ajoneuvoa, joka kelluu magneeteilla (Yadav, 2013). Vuonna 1934 saksalaiselle miehelle nimeltä Hermann Kemper annettiin patentti ensimmäiselle käsitteelle magneettinen, levitoiva juna (Yadav, 2013). Idea alkoi todellakin ilmetä vasta 1960-luvulla. Tällä hetkellä Saksa ja Japani alkoivat tutkia maglevin potentiaalia. 70- ja 80-luvuilla molemmat maat edistyivät merkittävästi näiden junien kehittämisessä. Saksa rakensi ja testasi sarjan maglev-prototyyppejä ja kutsui niiden suunnittelua TransRapidiksi (kuva 1). Junat saavuttivat testiradalla yli 402 km / h: n nopeuden (Luu, 2005). Japani testasi myös kahta omaa malliaan, nimeltään ML-500 ja myöhemmin MLU. Heidän junansa pystyivät ylittämään 483 km / h: n nopeuden (Luu, 2005). 
Kuva 1
Transrapid testauskeskuksessa Saksassa Bremenin lähellä. Lähde: © Stahlkocher / CC BY-SA 3.0
Japani jatkoi maglev-teknologiansa kehittämistä 90-luvulle ja sen jälkeen. He testasivat uuden sarjan, nimeltään MLX, joka rikkoi 350 mph (563 km / h) vuonna 2003 (Yadav, 2013). Maan kaupallisia linjoja ei ole perustettu, mutta ne tekevät edelleen tutkimusta. Saksassa ehdotettiin kaupallista TransRapid-linjaa, joka yhdistää Berliinin ja Hampurin vuonna 1992. Hallitus kuitenkin keskeytti projektin vuonna 2000 (Luu, 2005). Kaikki ei kuitenkaan kadonnut, kun kiinalaiset huomasivat ja tilasivat saksalaiset rakentamaan TransRapid-junan Shanghaihin. Tämän hankkeen tuloksena syntynyt Shanghai Maglev (kuva 2) on nyt ainoa kaupallisessa käytössä oleva nopea maglev-juna. Se kuljettaa matkustajia 19 mailin (30 km) etäisyydellä 8 minuutissa ja saavuttaa huippunopeuden yli 431 km / h (Coates, 2004). Niinpä Kiinasta on nopeasti tullut suuri toimija maailmanlaajuisilla maglev-markkinoilla. Maa aikoo jatkaa maglev-infrastruktuurinsa kehittämistä. 
Kuva 2
Shanghai Maglev lähtee Pudongin kansainväliseltä lentokentältä, ja Shanghai Transit Map -juna-kartta näyttää reitin Longyang Roadille. Kollaasilähteet: © Alex Needham / Public Domain and Metropedia
Kuinka se toimii?
Maglev-junissa ei ole pyöriä tai kiskoja. Kuten kuvassa 3 on esitetty, heillä on ohjaimia ja ne kelluvat näitä ohjaimia pitkin koskaan koskematta niihin. 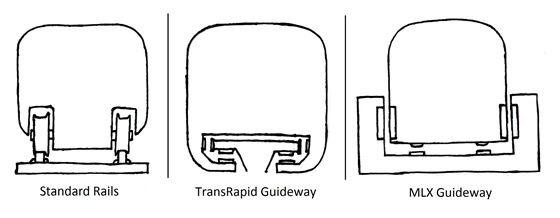
Kuva 3
Pyörän ja kiskon vertailu ohjaajiin. Lähde: Kirjoittaja, johdettu Lee: stä (2006).
Maglev-toiminnallisuuden saavuttamiseksi on kolme olennaista osaa: levitaatio, työntövoima ja ohjaus (kuten alla nähdään). 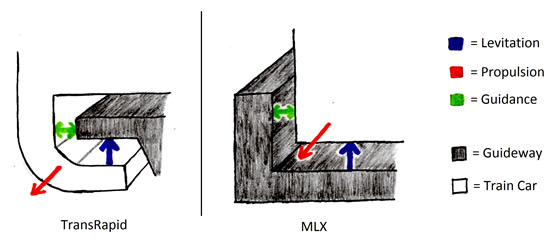
Kuva 4
Levitaatio, työntövoima ja opastus maglevissä. Lähde: Kirjoittaja, johdettu Lee: stä (2006).
Levitaatio
Levitaatio on junan kyky pysyä ripustettuna radan yläpuolella. Levitaatiotekniikkaa on kahta tärkeää tyyppiä:
- Sähkömagneettinen jousitus (EMS): EMS (kuva 5) käyttää ohjaukseen ja junaan sijoitettujen sähkömagneettien houkuttelevaa voimaa levitaation saavuttamiseksi.Tämän menetelmän etuna on, että se on yksinkertaisempi toteuttaa kuin elektrodynaaminen jousitus (käsitellään jäljempänä) ja että se ylläpitää levitaatiota nollanopeudella. Haittoja on, että järjestelmä on luonnostaan epävakaa. Suurilla nopeuksilla on vaikeaa ylläpitää oikeaa etäisyyttä junan ja ohjaustien välillä. Jos tätä etäisyyttä ei voida pitää, juna ei pysty levitoimaan ja tulee jauhamalla pysähtymään. Tämän huomioon ottamiseksi EMS vaatii monimutkaisia palautteenohjausjärjestelmiä, jotta juna on aina vakaa (Lee, 2006).
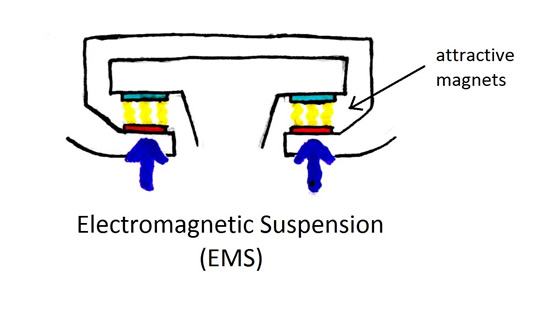
Kuva 5
Sähkömagneettinen jousitus (EMS). Käyttää houkuttelevia magneettivoimia. Lähde: Kirjoittaja, johdettu Lee: stä (2006).
- Elektrodynaaminen jousitus (EDS): EDS (kuva 6) käyttää ajoradalle ja junaan sijoitettujen (suprajohtavien) magneettien vastavoimaa. saavuttaa levitaatio. Magneetit liikkuvat toistensa ohi, kun juna on käynnissä, ja tuottavat hylkivän voiman. Tämän menetelmän etuna on, että se on uskomattoman vakaa suurilla nopeuksilla. Oikean etäisyyden ylläpitäminen junan ja ohjaustien välillä ei ole huolenaihe (Lee, 2006). Haittapuolina on se, että junan levitoimiseksi on rakennettava riittävä nopeus. Lisäksi tämä järjestelmä on paljon monimutkaisempi ja kalliimpi toteuttaa.
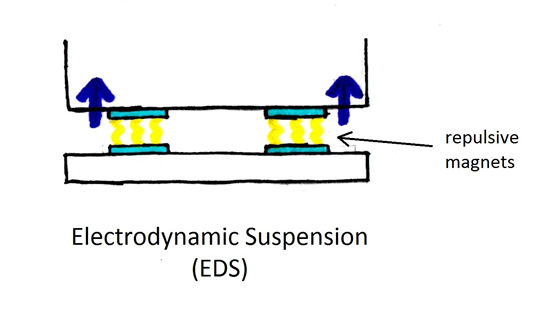
Kuva 6
Elektrodynaaminen jousitus (EDS). Käyttää vastenmielisiä magneettivoimia. Lähde: Kirjoittaja, johdettu Lee: stä (2006).
Propulsio
Propulsio on juna, joka ajaa junaa eteenpäin. Maglev käyttää sähköistä lineaarimoottoria työntövoiman saavuttamiseksi. Normaali sähkömoottori käyttää magnetismia vääntömomentin luomiseen ja akselin pyörimiseen. Siinä on kiinteä kappale, staattori, joka ympäröi pyörivää kappaletta, roottoria. Staattoria käytetään pyörivän magneettikentän tuottamiseen. Tämä kenttä aiheuttaa roottoriin pyörivän voiman, joka saa sen pyörimään. Lineaarimoottori on yksinkertaisesti rullattu versio tästä (katso kuva 7). Staattori on tasainen ja roottori lepää sen yläpuolella. Staattori muodostaa pyörivän magneettikentän sijaan kentän, joka kulkee pituutta pitkin. Vastaavasti roottori kokee pyörivän voiman sijasta lineaarisen voiman, joka vetää sen alas staattoria. Siten sähköinen lineaarimoottori tuottaa liikettä suoraan suorassa. Tämä moottori voi kuitenkin tuottaa voimaa vain, kun roottori on staattorin yläpuolella. Kun roottori on saavuttanut loppuaan, se lakkaa liikkumasta. 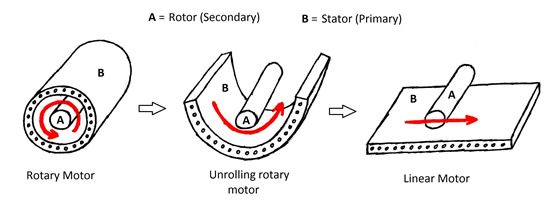
Kuva 7
Pyörivä moottori vs. lineaarimoottori. Lähde: Kirjoittaja, johdettu Lee: stä (2006).
Lineaarimoottoria kuvattaessa standardi on käyttää termiä ”ensisijainen” ”staattorin” sijaan ja ”toissijainen” ”roottorin” sijaan. Maglev-junissa toissijainen on kiinnitetty junavaunujen pohjaan, ja ensisijainen on ohjauksessa. Joten magneettikenttä lähetetään ohjainta pitkin ja se vetää junaa sen jälkeen. Tällöin koko maglev-radan pituutta voidaan pitää osana junan moottoria. Tähän mennessä kuvattu järjestelmä on lineaarinen induktiomoottori (LIM). Sitä kutsutaan, koska primaarissa oleva magneettikenttä indusoi magneettikentän sekundäärissä. Alkuperäisen kentän ja indusoidun kentän välinen vuorovaikutus aiheuttaa toissijaisen vetämisen pitkin. Tässä kokoonpanossa toissijainen on kuitenkin aina jonkin verran jäljessä primäärin liikkuvasta kentästä. Tämä viive on energian ja nopeuden menetys. Lineaarisessa synkronimoottorissa (LSM) viive poistetaan kiinnittämällä kestomagneetteja toissijaiseen. Koska toissijainen tuottaa nyt oman paikallaan olevan magneettikentän, se kulkee ensiöpuolta alaspäin synkronoituna liikkuvan kentän kanssa – tästä syystä nimi tälle moottorimuunnokselle (Gieras, 2011). Koska LSM: t ovat nopeampia ja tehokkaampia, ne ovat ensisijainen moottori nopeissa maglev-junissa (Lee, 2006).
Opastus
Ohjaus pitää junan keskitettynä ohjain. Suuren nopeuden magleville tämän saavuttamiseksi käytetään hylkiviä magneettivoimia (kuva 8). TransRapid-ohjelmassa on kaksi sähkömagneettista kiskoa, jotka on sijoitettu junaan ohjaustien molemmille puolille päin. Nämä kiskot estävät junaa liikkumasta liian kaukana kurssista (Lee, 2006). MLX: ssä ohjaus on yhdistetty levitaatiojärjestelmään. Junan kummallakin puolella olevat levitaatiokiskot on kytketty toisiinsa. Tämän yhteyden kautta, kun juna liikkuu lähemmäs toista sivua, syntyy palautusvoima, joka työntää sen takaisin kohti keskustaa. Siten MLX on sekä levitoitu että ohjattu samanaikaisesti (Lee, 2006). 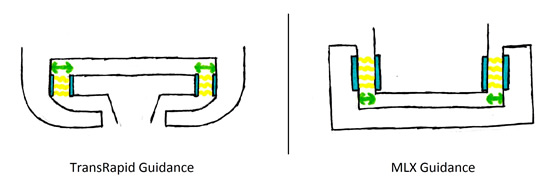
Kuva 8
Transrapidin ja MLX: n ohjausjärjestelmä. Molemmat käyttävät hylkiviä magneetteja. Lähde: Kirjoittaja, johdettu Lee: stä (2006).
Maglevin edut
Maglev-junien ilmeisin vetovoima on, että ne voivat matkustaa nopeammin kuin perinteiset rautatiejunat. Ainoa kaupallinen suurnopeusmaglev, Shanghai Maglev, on nykyisin nopein juna.Se kulkee yli 80 km / h (80 km / h) nopeammin kuin nopein nopein pyöräkisko (320 km / h Hayabusa, 2013). Ja se on vasta ensimmäinen. Junan ja ohjaustien välinen kitkan puute poistaa monia perinteisiä junia sitovia rajoja. Maglev saa täältä vain nopeammin (Luu, 2005). On muita hienovaraisempia ominaisuuksia, jotka myös tekevät maglevistä houkuttelevia:
- Pitkäikäisyys: Perinteisiin pyöriin ja kiskoihin kohdistuu paljon stressiä ajan myötä. Ne on vaihdettava ja korjattava säännöllisesti, jotta ne pysyisivät toiminnassa. Maglevissä junan ja ohjaustien välillä ei ole yhteyttä, joten kulumista on huomattavasti vähemmän. Maglev-osien käyttöikä on tämän vuoksi paljon pidempi (Powell, 2003). Taloudellisesti tämä on varsin kannustin, koska korjaus ja huolto ovat kalliita ja aikaa vieviä toimintoja.
- Turvallisuus: Näyttää siltä, että nämä junat ovat turvallisempia, koska ne kulkevat niin paljon nopeammin kuin pyörillä. kollegansa. Se on totta kuitenkin. Maglev-junia on melkein mahdotonta suistua raiteilta (Luu, 2005). Se vie jotain täydellistä ajoradan romahtamista erottamaan juna radalta. Lisäksi sää ei ole suuri ongelma. Koska junat eivät ole riippuvaisia kitkasta liikkeessä, lumi, jää ja sade eivät aiheuta juurikaan vaikutusta (Luu, 2005). Lopuksi on helppo nostaa ohjaimia. Jos junat kulkevat raiteilla, jotka ovat kymmenen jalkaa maanpinnan yläpuolella, on pienempi mahdollisuus törmätä sen polulla olevaan esineeseen (Luu, 2005).
- Energiatehokkuus: Levitaation toinen etu on, että nämä junat älä menetä energiaa kitkaan. Tämä antaa heille edun tehokkuudessa (Wang 2010). Energiankulutus on välttämätöntä kuljetusjärjestelmän menestykselle. Suuri osa käyttökustannuksista menee sähkön maksamiseen. Siksi tämä hyötysuhde on erittäin tärkeä. Vaikka maglev-junat ovat tehokkaampia, ne eivät tällä hetkellä ole olennaisesti tehokkaampia kuin moderni suurnopeusjuna. Heillä on kuitenkin potentiaalia olla paljon ylivoimainen tässä luokassa.
- Ympäristövaikutukset: Maglev-junat voivat tehdä tiukempia käännöksiä kuin suurten nopeuksien kiskot. Tämän avulla voidaan rakentaa kulkutiet, jotka pystyvät liikkumaan maastossa paljon paremmin (Wang 2010). Polut voidaan suunnitella vaikuttamaan mahdollisimman vähän ympäristöön. Myös kulkutiet vievät vähemmän pintaa kuin kiskot (Wang 2010). Tämä vähentää ympäristövaikutuksia entisestään. Ja kuten aikaisemmin todettiin, ajoradat ovat helposti nostettavissa maasta (Luu, 2005). Kasvit ja eläimet ovat turvallisempia, kun juna kulkee niiden yläpuolella, eivätkä ne tynnyritä aivan heidän vieressään.
- Melupäästö: Kun otetaan huomioon kuljetusprojekti, melu (kohtuullisissa rajoissa) ei ole yhtä suuri taloudellisuus tai turvallisuus. Melun vähentämistä pidetään kuitenkin edelleen positiivisena piirteenä. Maglev-junat ovat hiljaisempia kuin nykyaikaiset junat, joten tämä on toinen asia heidän hyväkseen (Wang, 2010).
Maglevin haitat
Vaikka on olemassa monia yläpuolia, siellä on ovat edelleen syitä, miksi maglev-junia ei rakenneta kaikkialle. Ehkä suurin syy on se, että maglev-radat eivät ole yhteensopivia nykyisen rautatieinfrastruktuurin kanssa. Kaikkien organisaatioiden, jotka yrittävät toteuttaa maglev-järjestelmää, on aloitettava alusta alkaen ja rakennettava täysin uusi kappale. Tähän liittyy erittäin suuri alkuinvestointi (Coates, 2004). Vaikka ajourat maksavat ajan myötä vähemmän kuin kiskot (Powell, 2003), on vaikea perustella niin paljon menoja etukäteen. Toinen ongelma on, että maglev-junat matkustavat nopeasti, mutta ne eivät välttämättä kulje tarpeeksi nopeasti. Maat, joissa on jo olemassa suurten nopeuksien kiskot, eivät halua käyttää miljardeja dollareita sellaisen järjestelmän toteuttamiseen, joka on vain vähän parempi kuin nykyinen ratkaisu. Näiden junien markkinat eivät tällä hetkellä ole kovin suuret. On vaikea kiistää, että nämä junat ovat parempia kuin tavalliset. Siitä huolimatta on tehtävä enemmän töitä, ennen kuin niiden toteuttaminen kannattaa maailmanlaajuisesti.
Maglevin sähkötekniikka
Höyrykoneesta lähtien junat ovat perinteisesti olleet mekaanisten insinöörien piirissä. . Ne olivat kaikki moottoreita ja akseleita, pyöriä ja moottoreita. Maglev-tekniikan käyttöönotto on kuitenkin rikkonut tämän perinteen. Näiden junien kehittäminen on edellyttänyt panostusta lukuisilta eri aloilta kuin konetekniikasta, mukaan lukien fysiikka ja kemia. Mikä tärkeintä, se on kuitenkin tuonut sähköinsinöörit pöydälle. Alusta lähtien sähköinsinöörit ovat olleet merkittäviä avustajia maglev-tekniikan kehittämisessä. Sähköinsinööri Eric Laithwaite kehitti ensimmäisen lineaarisen induktiomoottorin, tärkeän ja välttämättömän edeltäjän maglev-junille. Hermann Kemper, jonka monet uskovat olevan Maglevin isä, oli myös sähköinsinööri. Saksalaiset ja japanilaiset sähköinsinöörit pyrkivät luomaan maglev-ohjelmat omassa maassaan.Ja tänään sähköinsinöörit tekevät tekniikasta parempaa ja parempaa, jotta se voi houkutella maita ympäri maailmaa. Maglev-junissa on yllättävän vähän liikkuvia osia. Ne kaikki koskevat sähkövirtoja, magneetteja ja lankasilmukoita. Joitakin tärkeitä aiheita kentälle ovat sähkömagneettiset kentät ja aallot, piiriteoria, takaisinkytkentäjärjestelmät ja energiatekniikka. Kaikki nämä kuuluvat sähköinsinöörien asiantuntemukseen. Siksi juuri sähköinsinöörejä tarvitaan ratkaisemaan tämän tekniikan suurimmat ongelmat. Junista on tehtävä nopeampi ja energiatehokkaampi. Ne on koko ajan pidettävä hyvin turvallisuuden rajoissa. Ohjauskiskot on tehtävä halvemmiksi, helpommin toteutettaviksi ja ehkä paremmin yhteensopiviksi olemassa olevien kiskojen kanssa. Ohjausjärjestelmät on tehtävä virheettömiksi. Kaikki nämä ja muut kysymykset vaativat sähköinsinööriä tulemaan selvittämään vastauksensa.
Maglevin tulevaisuus
Maglev-tekniikalla on paljon tulevaisuuden lupauksia. Se voi olla halvempi, nopeampi, turvallisempi ja vihreämpi liikennemuoto kuin meillä on tänään. Ja joidenkin sähköinsinöörien avulla siitä tulee kaikki nämä asiat. Tätä tekniikkaa on mahdollista soveltaa kaikkialla kaupunkien joukkoliikenteestä maastomatkoihin. On jopa ehdotettu pitkien maanalaisten putkien rakentamista, ilman imemistä putkista ja maglev-junien sijoittamista niiden sisälle. Tässä asetuksessa tuulen vastus ei olisi käytännössä lainkaan, joten juna voisi helposti saavuttaa nopeuden, joka ylittää äänen nopeuden (Thornton, 2007). Vaikka tämän tekniikan yleistymisestä voi kulua kauan, on vaikea kieltää sen olevan jossain vaiheessa yleistä. Etuja on liian vaikea sivuuttaa. Tällä hetkellä käytössä on vain yksi kaupallinen maglev-juna, ja se on jo peittänyt kaiken edeltäjänsä. Kuinka tämä tekniikka kehittyy ja kehittyy, kun siirrymme tulevaisuuteen? Vain aika näyttää. Mutta on erittäin uskottavaa, että olemme nyt kuljetusvallankumouksen kärjessä. Odotan innolla liukumista maaseudulla nopeudella 300 mph levittävässä magneettilaatikossa.
Bibliografia
Ehdotetut linkit
Katso myös
- Autonomiset ajoneuvot
- Sähköparistot uusiutuvaa energiaa varten
- Älykäs infrastruktuuri