Maglev: Mágneses lebegő vonatok
A Maglev-vonatok mágnesességgel lebegnek azokon a vágányokon, amelyeken haladnak. Gyorsabbak, hatékonyabbak és környezetbarátabbak, mint a modern kerekes vonatok. Lehet, hogy hamarosan egy napon a maglev technológia világszerte elterjedt lesz. Ez a cikk áttekinti e vonatok történetét, működését, valamint azok előnyeit és hátrányait. Megbeszéli továbbá az elektrotechnika fontosságát a maglev fejlesztésében, és azt, hogy az elektrotechnikusok hogyan tehetik ezt a technológiát a következő közlekedési forradalomba.
Bevezetés
Képzeljünk el egy kerek nélküli vonatot. Ahelyett, hogy végiggördülne a pályán, csendesen lebeg fölött, és simán siklik eredetétől a célig anélkül, hogy sínt érintene. Ez tudományos-fantasztikusnak tűnhet, de ennek a technológiának a példányai már a világ számos pontján léteznek. Maglev vonatokként ismertek (a mágneses lebegés kifejezésből származnak). Ezek a futurisztikus mozdonyok sok új és izgalmas utazási lehetőséget kínálnak. Lehetőségük van arra, hogy gyorsabbak, biztonságosabbak és energiatakarékosabbak legyenek, mint a hagyományos közlekedési rendszerek. Noha az ilyen vonatok száma jelenleg kevés, a kutatómunkát jelentik az elektrotechnikai közösségben. Ennek eredményeként a maglev hamarabb elterjedhet, mint gondolná.
A Maglev története
A maglev technológia alapgondolatai a 20. század elejére vezethetők vissza. Sok munka folyt ezen vonatok alapjainak megalapozásával, ideértve az elektromos motorok fejlesztését és a mágnesesség kutatását. Néhány tudós, nevezetesen Robert Goddard és Emile Bachelet, még olyan járművet is merészelt javasolni, amely mágnesek segítségével lebegne (Yadav, 2013). 1934-ben egy német ember, Hermann Kemper néven, szabadalmat kapott a mágneses, lebegő vonat első koncepciójára (Yadav, 2013). Csak az 1960-as években kezdett igazán megnyilvánulni az ötlet. Ebben az időben Németország és Japán elkezdte kutatni a maglev lehetőségeit. A 70-es és 80-as években mindkét ország nagy előrelépést tett e vonatok fejlesztése terén. Németország egy sor prototípus maglev rendszert épített és tesztelt, és azok tervezését TransRapid-nak nevezte (1. ábra). A vonatok 250 km / h (402 km / h) sebességet értek el a tesztpályán (Luu, 2005). Japán két saját tervezésű sorozatot is tesztelt, az ML-500, később pedig az MLU nevet. Vonataik meghaladhatták a 300 mérföld / órát (483 km / h) (Luu, 2005). 
1. ábra
Transrapid a németországi tesztközpontban Bréma közelében. Forrás: © Stahlkocher / CC BY-SA 3.0
Japán a 90-es években és azon túl is folytatta maglev technológiájának fejlesztését. Kipróbáltak egy új sorozatot, az MLX nevet, amely 2003-ban 350 km / h (563 km / h) sebességet tört meg (Yadav, 2013). Az országban nem alakítottak ki kereskedelmi vonalakat, de továbbra is kutatást végeznek. Németországban 1992-ben javasolták a Berlint és Hamburgot összekötő kereskedelmi vonalat, a TransRapid-t. 2000-ben azonban a kormány leállította a projektet (Luu, 2005). Mégsem minden veszett el, mivel a kínaiak észrevették és megbízták a németeket, hogy építsenek egy TransRapid vonatot Sanghajban. A Sanghaji Maglev (2. ábra), amely ennek a vállalkozásnak az eredménye, ma az egyetlen nagysebességű maglev-vonat, amelyet kereskedelmi célokra használnak. 8 perc alatt 19 mérföld (30 km) távolságot szállít az utasok számára, és elérte a maximális sebességet, amely meghaladja a 43 km / h (Coates, 2004) sebességet. Így Kína gyorsan nagy szereplővé vált a világ maglev piacán. Az ország azt tervezi, hogy folytatja maglev infrastruktúrájának fejlesztését. 
2. ábra
Sanghaji Maglev elhagyja a Pudong Nemzetközi Repülőteret, a Shanghai Transit Map vasúti térkép mutatja a Longyang út felé vezető útvonalat. Kollázsforrások: © Alex Needham / Public Domain and Metropedia
Hogyan működik?
A Maglev vonatoknak nincs kereke vagy síne. Amint a 3. ábrán látható, vannak vezetősávjaik, és úgy lebegnek ezeken a vezetőutakon, hogy soha nem érintik meg őket. 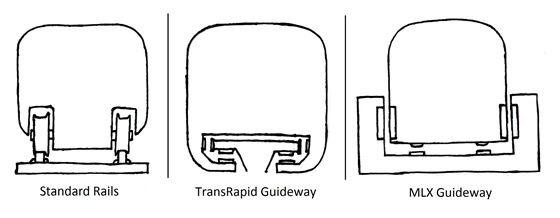
3. ábra
A kerék-sín és a vezetőpályák összehasonlítása. Forrás: Szerző, Lee (2006) származéka.
A maglev-funkcionalitás elérésének három lényeges része van: levitáció, meghajtás és útmutatás (az alábbiakban látható). 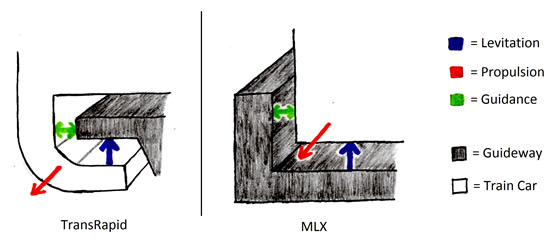
4. ábra
Lebegés, meghajtás és útmutatás a maglevben. Forrás: Szerző, Lee (2006) származékából. A levitációs technológiának két fontos típusa van:
- Elektromágneses felfüggesztés (EMS): Az EMS (5. ábra) a levezető eléréséhez a vezetőpályán és a vonaton elhelyezett elektromágnesek vonzó erejét használja fel.Ennek a módszernek az az előnye, hogy egyszerűbb megvalósítani, mint az elektrodinamikus felfüggesztést (lásd alább), és hogy a lebegést nulla sebességgel tartja fenn. Hátránya, hogy a rendszer eleve instabil. Nagy sebességnél nehézzé válik a vonat és a vezetőút közötti helyes távolság fenntartása. Ha ezt a távolságot nem lehet betartani, akkor a vonat nem tud lebegni, és meg fog állni. Ennek figyelembe vételéhez az EMS komplex visszacsatolás-ellenőrző rendszereket igényel, hogy a vonat mindig stabil maradjon (Lee, 2006).
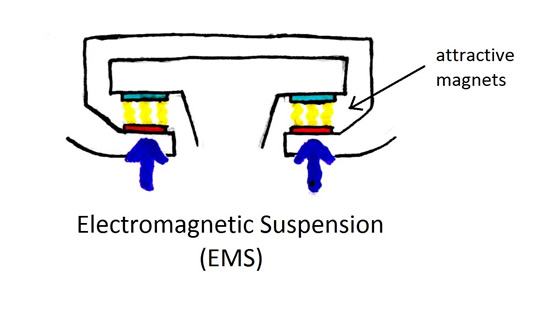
5. ábra
Elektromágneses felfüggesztés (EMS). Vonzó mágneses erőket alkalmaz. Forrás: Szerző, Lee (2006) származéka.
- Elektrodinamikus felfüggesztés (EDS): Az EDS (6. ábra) a vezetőpályára és a vonatra helyezett (szupravezető) mágnesek taszító erejét használja. érje el a lebegést. A mágnesek elmennek egymás mellett, miközben a vonat jár, és létrehozzák a taszító erőt. Ennek a módszernek az az előnye, hogy hihetetlenül stabil nagy sebességnél. A vonat és a vezetőút közötti helyes távolság fenntartása nem jelent gondot (Lee, 2006). Hátránya, hogy elegendő sebességet kell kialakítani ahhoz, hogy a vonat egyáltalán lebegjen. Ezenkívül ez a rendszer sokkal összetettebb és költségesebb a megvalósítása.
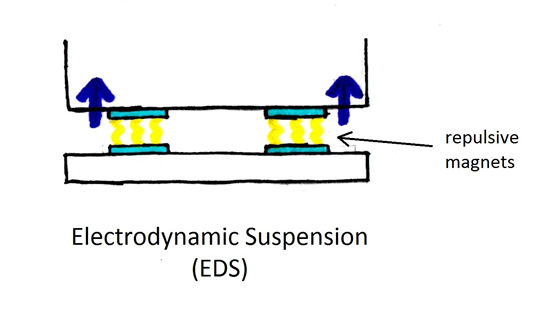
6. ábra
Elektrodinamikus szuszpenzió (EDS). Visszataszító mágneses erőket használ. Forrás: Szerző, Lee (2006) származéka.
Hajtás
A meghajtás az az erő, amely a vonatot előre hajtja. Maglev elektromos lineáris motorral hajtja végre a meghajtást. Egy normál elektromos forgómotor mágnesességgel hozza létre a nyomatékot és forgassa el a tengelyt. Van egy álló darabja, az állórész, amely körülveszi a forgó darabot, a rotort. Az állórész forgó mágneses mező létrehozására szolgál. Ez a mező forgási erőt vált ki a forgórészen, ami megpördül. A lineáris motor ennek egyszerűen a tekercselt változata (lásd a 7. ábrát). Az állórész laposan van lefektetve, és a rotor felette nyugszik. Forgó mágneses mező helyett az állórész olyan mezőt állít elő, amely a hosszában lefelé halad. Hasonlóképpen, a rotor egy forgó erő helyett egy lineáris erőt tapasztal, amely lehúzza az állórészen. Így egy elektromos lineáris motor közvetlenül egyenes vonalú mozgást produkál. Ez a motor azonban csak akkor képes erőt produkálni, amikor a rotor az állórész felett van. Miután a rotor elérte a végét, leáll. 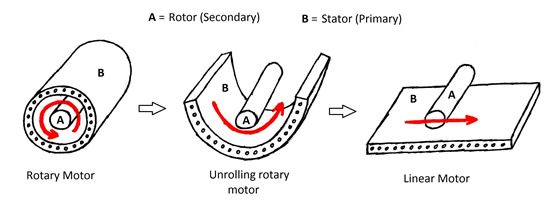
7. ábra
Rotációs motor a lineáris motorral szemben. Forrás: Szerző, Lee (2006) származéka.
A lineáris motor leírásakor a szabvány az „elsődleges” kifejezést használja az „állórész” helyett, a „másodlagos” szót pedig a „rotor” helyett. A maglev vonatokban a másodlagos a kocsik aljára van rögzítve, az elsődleges pedig a vezetőpályán van. Tehát mágneses mezőt küldünk le a vezetőpályán, és ez húzza utána a vonatot. Bizonyos szempontból akkor a maglev vágány teljes hossza a vonat motorjának részének tekinthető. Az eddig leírt rendszer egy lineáris indukciós motor (LIM). Azért hívják, mert az elsődleges mágneses mező mágneses teret indukál a másodlagosban. Az eredeti mező és az indukált mező közötti kölcsönhatás okozza a másodlagos húzódását. Ebben a konfigurációban azonban a másodlagos mindig valamivel elmarad az elsődleges mozgó terétől. Ez a lemaradás energia- és sebességvesztés forrása. Egy lineáris szinkron motorban (LSM) a lemaradást úgy szüntetik meg, hogy állandó mágneseket rögzítenek a szekunderhez. Mivel a másodlagos jelenleg saját álló mágneses terét állítja elő, a mozgó mezővel szinkronban halad lefelé az primeren – innen kapta a nevét ennek a motorváltozatnak (Gieras, 2011). Mivel az LSM gyorsabb és hatékonyabb, ezért ezek a motorok a nagysebességű maglev vonatokon (Lee, 2006).
Útmutatás
A vezetés az, ami a vonatot középpontjában tartja. vezetőút. A nagysebességű maglev esetén ennek eléréséhez taszító mágneses erőket alkalmaznak (8. ábra). A TransRapid-ban két elektromágneses sín van elhelyezve a vonaton, a vezetőpálya két oldala felé nézve. Ezek a sínek megakadályozzák, hogy a vonat túl messzire mozogjon (Lee, 2006). Az MLX-ben az irányítás párosul a levitációs rendszerrel. A vonat két oldalán található levitációs sínek össze vannak kötve. Ezen a kapcsolaton keresztül, amikor a vonat az egyik oldalhoz közelebb mozog, helyreállító erő vált ki, amely a középpont felé tolja vissza. Így az MLX egyszerre levitált és irányított (Lee, 2006). 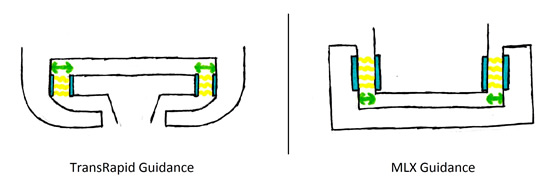
8. ábra
A Transrapid és az MLX útmutatási rendszere. Mindkettő taszító mágnest használ. Forrás: Szerző, Lee (2006) származéka.
A Maglev előnyei
A maglev vonatok legkézenfekvőbb vonzereje, hogy gyorsabban tudnak közlekedni, mint a hagyományos vasúti vonatok. Az egyetlen kereskedelmi sebességű maglev, a Sanghaji Maglev ma a létező leggyorsabb vonat.50 km / h-nál (80 km / h-nál) gyorsabban halad, mint a leggyorsabb nagy sebességű kerék-sín (320 km / h Hayabusa, 2013). És ez csak az első. A vonat és a vezetőút közötti súrlódás hiánya sok korlátot megszüntet, amelyek megkötik a hagyományos vonatokat. Maglev innen csak gyorsabb lesz (Luu, 2005). Vannak más, finomabb tulajdonságok is, amelyek szintén vonzóvá teszik a maglevet:
- Hosszú élettartam: A hagyományos kerekek és sínek idővel nagy megterhelésnek vannak kitéve. A működésük érdekében rendszeresen cserélni és javítani kell. Maglevben nincs kapcsolat a vonat és a vezetőút között, így lényegesen kevesebb a kopás. A maglev alkatrészek élettartama ennek megfelelően sokkal hosszabb (Powell, 2003). Gazdaságilag ez meglehetősen ösztönző, mivel a javítás és karbantartás költséges és időigényes tevékenység.
- Biztonság: Ellen intuitívnak tűnhet, hogy ezek a vonatok biztonságosabbak, mivel sokkal gyorsabban haladnak, mint a kerekesek. társaik. Ennek ellenére igaz. A Maglev vonatokat szinte lehetetlen kisiklani (Luu, 2005). Valami olyan lenne, mint a teljes vezetőút összeomlása, hogy elváljon egy vonat a vágányától. Ezenkívül az időjárás nem jelent sok problémát. Mivel a vonatok nem támaszkodnak a súrlódásra a mozgás során, a hó, a jég és az eső kevés vagy semmilyen hatást nem okoz (Luu, 2005). Végül könnyű felemelni a vezetőpályákat. Ha a vonatok tíz méter magasan haladnak a talaj felett, kisebb az esélye az ütközésnek az útjában lévő tárgyakkal (Luu, 2005).
- Energiahatékonyság: A levitáció másik előnye, hogy ezek a vonatok ne veszítsen energiát a súrlódás miatt. Ez előnyt jelent számukra a hatékonyság terén (Wang 2010). Az energiafogyasztás elengedhetetlen a szállítási rendszer sikeréhez. A működtetés költségeinek nagy része a villamos energia fizetésére megy. Ezért a hatékonyság ezen előnye nagyon fontos. Bár a maglev vonatok hatékonyabbak, jelenleg lényegesen nem hatékonyabbak, mint a modern nagysebességű vasutak. Ennek ellenére képesek arra, hogy ebben a kategóriában sokkal jobbak legyenek.
- Környezeti hatás: A Maglev vonatok szorosabban fordulhatnak, mint a nagy sebességű sínek. Ez lehetővé teszi olyan vezetőutak építését, amelyek sokkal jobban képesek eligazodni a terepen (Wang 2010). Az utakat úgy lehet kialakítani, hogy a lehető legkevesebb hatással legyenek a környezetre. A vezetőutak is kevesebb területet foglalnak el, mint a sínek (Wang 2010). Ez tovább csökkenti a környezeti terhelést. És amint azt korábban említettük, a vezetőutak könnyen felemelhetők a talajról (Luu, 2005). A növények és az állatok biztonságosabbak a felettük közlekedő vonattal, és nem csöpögnek mellettük.
- Zajszennyezés: A szállítási projekt mérlegelésekor a zaj (ésszerű határokon belül) nem olyan nagy gazdaságosság vagy biztonság szempontjából aggodalomra ad okot. A zajcsökkentést azonban továbbra is pozitív tulajdonságnak tekintik. A Maglev vonatok halkabbak, mint a korabeli vonatok, ezért ez egy másik pont a javukra (Wang, 2010).
A Maglev hátrányai
Bár számos felfelé akad, még mindig azok az okok, amelyek miatt a maglev vonatokat nem mindenhol építik. A legnagyobb ok talán az, hogy a maglev-vezetőpályák nem kompatibilisek a meglévő vasúti infrastruktúrával. Minden olyan szervezetnek, amely megpróbálja megvalósítani a maglev rendszert, a semmiből kell indulnia, és teljesen új pályasort kell készítenie. Ez nagyon magas kezdeti beruházással jár (Coates, 2004). Annak ellenére, hogy a vezetőpályák idővel olcsóbbak, mint a sínek (Powell, 2003), nehéz igazolni, hogy ennyit költsenek előre. További probléma, hogy a maglev vonatok gyorsan utaznak, de lehet, hogy nem elég gyorsan. Azok az országok, ahol már vannak nagy sebességű sínek, nem akarnak dollármilliárdokat költeni egy olyan rendszer megvalósítására, amely csak kissé jobb, mint a meglévő megoldás. Ezeknek a vonatoknak a piaca jelenleg nem túl nagy. Nehéz vitatni, hogy ezek a vonatok felülmúlják a szokásosakat. Ettől függetlenül még több munkát kell elvégezni, mielőtt érdemes lenne ezeket világszerte megvalósítani.
Maglevek elektrotechnikája
A gőzgép óta a vonatok hagyományosan a gépészmérnökök körébe tartoznak. . Mind motorok, mind tengelyek, kerekek és motorok voltak. A maglev technológia bevezetése azonban megtörte ezt a hagyományt. Ezeknek a vonatoknak a fejlesztése a gépgyártáson kívül számos más területről, beleértve a fizikát és a kémiát is, szükséges input. A legfontosabb azonban az, hogy villamosmérnököket hozott le az asztalra. Kezdettől fogva az elektromos mérnökök voltak a fő hozzájárulók a maglev technológia fejlesztéséhez. Eric Laithwaite, villamosmérnök fejlesztette ki az első lineáris indukciós motort, amely a maglev vonatok fontos és szükséges előfutára. Hermann Kemper, aki sokak szerint Maglev apjának számít, szintén villamosmérnök volt. Német és japán villamosmérnökök azon munkálkodtak, hogy saját országaikban létrehozzák a maglev programokat.Ma pedig az villamosmérnökök egyre jobbá teszik a technológiát, hogy az a világ minden országába vonzó legyen. A Maglev vonatoknak meglepően kevés mozgó alkatrészük van. Mindegyik elektromos áramról, mágnesről és huzalról szól. A terület néhány fontos témája az elektromágneses mezők és hullámok, áramkörök elmélete, visszacsatolás-vezérlő rendszerek és az energetika. Mindezek villamosmérnökök szakértelmébe tartoznak. Ezért a villamosmérnökökre van szükség a technológia legnagyobb problémáinak megoldásához. A vonatokat gyorsabbá és energiahatékonyabbá kell tenni. Mindeközben a biztonság határain belül kell tartani őket. A vezetőpályákat olcsóbbá kell tenni, könnyebben kivitelezhetők és talán jobban összeegyeztethetők a meglévő sínekkel. Az ellenőrzési rendszereket hibátlanná kell tenni. Mindezek és még sok más kérdés arra hívja fel a figyelmet, hogy egy villamosmérnök fejtse ki válaszait.
A Maglev jövője
A Maglev technológia nagy ígérettel bír a jövőre nézve. Lehetséges, hogy olcsóbb, gyorsabb, biztonságosabb és zöldebb közlekedési forma lesz, mint ma. Néhány villamosmérnök segítségével pedig mindezek a dolgok lesznek. Ennek a technológiának bármi lehetősége van, a helyközi tömegközlekedéstől a terepjárókig. Vannak még javaslatok hosszú földalatti csövek építésére, a levegő kiszívására a csövekből és maglev vonatok elhelyezésére azokban. Ebben a beállításban gyakorlatilag nincs szélellenállás, így egy vonat könnyen elérheti a hangsebességet meghaladó sebességet (Thornton, 2007). Bár hosszú időbe telhet, amíg ez a technológia elterjed, mégis nehéz tagadni, hogy valamikor érvényesülni fog. Az előnyöket túl nehéz figyelmen kívül hagyni. Mostanáig csak egy kereskedelmi maglev vonat van használatban, és már mindent elhomályosított, ami előtte történt. Hogyan fog fejlődni és fejlődni ez a technológia a jövőbe lépéskor? Csak az idő fogja megmondani. De nagyon hihető, hogy most a közlekedési forradalom szakadékában állunk. Én például várom, hogy a vidéken 300 mph sebességgel siklhassak egy lebegő mágneses dobozban.
Irodalomjegyzék
Javasolt linkek
Lásd még
- Autonóm járművek
- Elektromos akkumulátorok a megújuló energiaforrásokhoz
- Intelligens infrastruktúra