磁気浮上式鉄道:磁気浮上式鉄道
磁気浮上式鉄道は、磁気を使用して、走行する線路の上を浮上します。それらは、現代の車輪付き列車よりも速く、効率的で、環境にやさしいです。近いうちに、リニアモーターカーが世界中で一般的になるかもしれません。この記事では、これらの列車の歴史、それらがどのように機能するか、そしてそれらの利点と欠点をレビューします。また、リニアモーターカーの開発における電気工学の重要性と、電気技師がこの技術を次の輸送革命にする方法についても説明します。
はじめに
車輪のない列車を想像してみてください。線路に沿って転がる代わりに、静かに上に浮かび、レールに触れることなく出発地から目的地までスムーズに滑走します。これは空想科学小説のように聞こえるかもしれませんが、このテクノロジーのインスタンスはすでに世界の多くの場所に存在しています。それらはリニアモーターカーとして知られています(磁気浮上という用語から派生)。これらの未来的な機関車は、旅行に多くの新しくエキサイティングな可能性を提供します。それらは、従来の輸送システムよりも速く、安全で、エネルギー効率が高い可能性があります。このような列車は今のところ数が少なく、かなりの差がありますが、電気工学コミュニティの研究の温床となっています。その結果、マグレブは思ったよりも早く一般的になる可能性があります。
マグレブの歴史
マグレブ技術の背後にある基本的な考え方は、20世紀初頭にさかのぼることができます。電気モーターの開発や磁気の研究など、これらの列車の基礎を築くために多くの作業が行われました。数人の科学者、すなわちロバート・ゴダードとエミール・バチェレットは、磁石を使用して浮かぶ乗り物をあえて提案しました(Yadav、2013年)。 1934年、ヘルマンケンペルという名前のドイツ人男性が、磁気浮上式鉄道の最初のコンセプトの特許を取得しました(Yadav、2013年)。アイデアが実際に現れ始めたのは1960年代になってからでした。この時、ドイツと日本はリニアモーターカーの可能性の研究を始めました。 70年代から80年代にかけて、両国はこれらの列車の開発において大きな進歩を遂げました。ドイツは一連のプロトタイプリニアモーターカーを構築してテストし、その設計をTransRapidと呼びました(図1)。列車はテストトラックで250mph(402 kph)を超える速度を達成しました(Luu、2005)。日本はまた、ML-500と後にMLUと呼ばれる独自の設計の2つのシリーズをテストしました。彼らの列車は時速300マイル(483キロ)を超えることができました(Luu、2005)。 
図1
ブレーメン近くのドイツのテストセンターでのトランスラピッド。出典:©Stahlkocher / CC BY-SA 3.0
日本は、90年代以降もリニアモーターカーの開発を続けました。彼らは、2003年に350 mph(563 kph)を破ったMLXと呼ばれる新しいシリーズをテストしました(Yadav、2013年)。国内には商業ラインは確立されていませんが、まだ研究を行っています。ドイツでは、1992年にベルリンとハンブルクを結ぶ商用のトランスラピッド線が提案されました。しかし、2000年に、政府はプロジェクトを停止しました(Luu、2005)。しかし、中国人が注意を払い、ドイツ人に上海にトランスラピッド列車を建設するよう依頼したため、すべてが失われたわけではありません。このベンチャーから生まれた上海リニアモーターカー(図2)は、現在、商用利用されている唯一の高速リニアモーターカーです。乗客は8分で19マイル(30 km)の距離を移動し、最高速度は250 mph(431 kph)を超えます(Coates、2004)。したがって、中国は急速に世界のリニアモーターカー市場で大きなプレーヤーになりました。国は、リニアモーターカーのインフラストラクチャの開発を継続する予定です。 
図2
上海磁浮交通が浦東国際空港を出発し、上海路線図の鉄道地図が龍陽路へのルートを示しています。コラージュの出典:©Alex Needham / Public Domain and Metropedia
どのように機能しますか?
リニアモーターカーには車輪やレールがありません。図3に示すように、ガイドウェイがあり、これらのガイドウェイに触れることなく浮かんでいます。 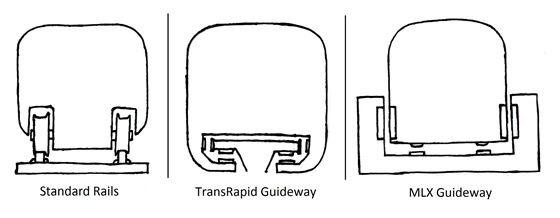
図3
ホイールレールとガイドウェイの比較。出典:著者、Lee(2006)から派生。
リニアモーターカーの機能を実現するには、浮上、推進、誘導の3つの重要な部分があります(以下を参照)。 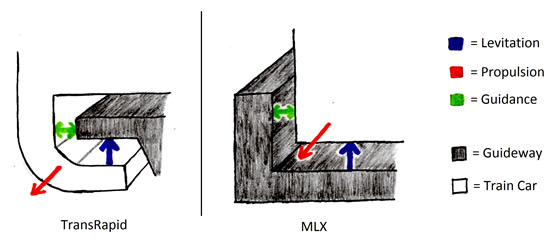
図4
磁気浮上式鉄道での浮上、推進、誘導。出典:著者、Lee(2006)から派生。
浮揚
浮揚とは、列車が線路の上に停車したままでいる能力です。浮揚技術には2つの重要なタイプがあります。
- 電磁サスペンション(EMS):EMS(図5)は、ガイドウェイと列車に配置された電磁石の引力を使用して浮揚を実現します。この方法の利点は、電気力学的サスペンション(以下で説明)よりも実装が簡単であり、ゼロ速度で浮上を維持することです。欠点は、システムが本質的に不安定であるということです。高速では、列車とガイドウェイの間の正しい距離を維持することが困難になります。この距離を保つことができない場合、列車は浮揚に失敗し、粉砕が停止します。これを説明するために、EMSは、列車が常に安定していることを保証するための複雑なフィードバック制御システムを必要とします(Lee、2006)。
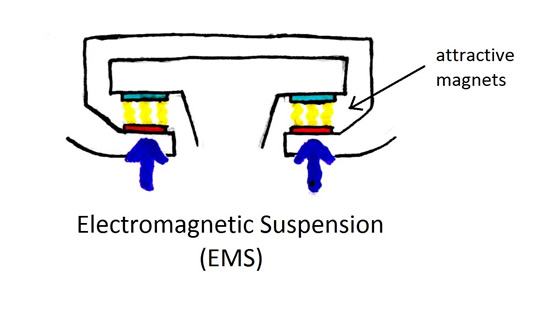
図5
電磁サスペンション(EMS)。引力を利用しています。出典:著者、Lee(2006)から派生。
- 電気力学的サスペンション(EDS):EDS(図6)は、ガイドウェイと電車に配置された(超伝導)磁石の反発力を使用して浮揚を達成します。列車が走っている間、磁石は互いにすれ違う動きをし、反発力を発生させます。この方法の利点は、高速で非常に安定していることです。列車とガイドウェイの間の正しい距離を維持することは問題ではありません(Lee、2006年)。欠点は、列車がまったく浮揚するために十分な速度を構築する必要があることです。さらに、このシステムは実装がはるかに複雑でコストがかかります。
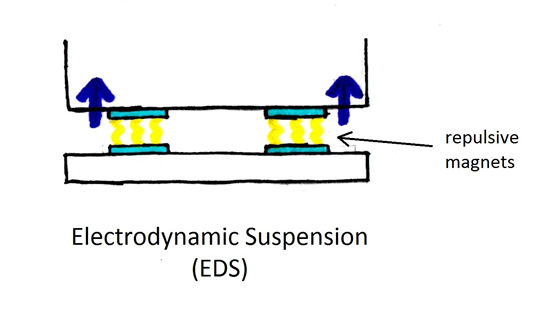
図6
電気力学的サスペンション(EDS)。反発磁力を使用します。出典:著者、Lee(2006)から派生。
推進力
推進力は、列車を前進させる力です。リニアモーターカーは、電気リニアモーターを使用して推進力を実現します。通常の電気回転モーターは、磁気を使用してトルクを生成し、車軸を回転させます。固定子である固定子があり、回転子である回転子を囲んでいます。固定子は回転磁界を生成するために使用されます。この場はローターに回転力を引き起こし、それがローターを回転させます。リニアモーターは、これを単に展開したものです(図7を参照)。固定子は平らに置かれ、回転子はその上に置かれます。回転磁界の代わりに、固定子はその長さ方向に移動する磁界を生成します。同様に、回転力の代わりに、ローターはそれをステーターに引き下げる直線力を受けます。したがって、電気リニアモーターは直線運動を直接生成します。ただし、このモーターは、ローターがステーターの上にあるときにのみ力を生成できます。ローターが終わりに達すると、ローターは動きを停止します。 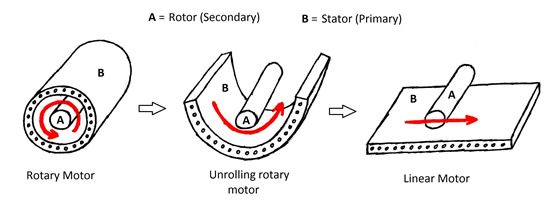
図7
ロータリーモーターとリニアモーター。出典:著者、Lee(2006)から派生。
リニアモーターを説明する場合、標準では「固定子」の代わりに「一次」、「回転子」の代わりに「二次」という用語を使用します。リニアモーターカーでは、セカンダリは車両の下部に取り付けられ、プライマリはガイドウェイにあります。そのため、磁場がガイドウェイに送られ、その後、列車が引き寄せられます。ある意味で、リニアモーターカーの全長は列車のモーターの一部と見なすことができます。これまでに説明したシステムは、リニア誘導モーター(LIM)です。一次磁場が二次磁場を誘導するため、このように呼ばれます。セカンダリが引き寄せられるのは、元のフィールドと誘導されたフィールドの間の相互作用です。ただし、この構成では、セカンダリは常にプライマリの移動フィールドよりもいくらか遅れます。この遅れは、エネルギーと速度の低下の原因です。リニア同期モーター(LSM)では、永久磁石を2次側に取り付けることで遅れを取り除きます。セカンダリは現在、独自の静止磁場を生成しているため、移動磁場と同期してプライマリを下に移動します。そのため、このバリアントのモーターの名前が付けられています(Gieras、2011)。 LSMはより高速で効率的であるため、高速リニアモーターカーで選択されるモーターです(Lee、2006)。
ガイダンス
ガイダンスは、列車を中央に配置するためのものです。ガイドウェイ。高速リニアモーターカーの場合、これを達成するために反発磁力が使用されます(図8)。トランスラピッドでは、ガイドウェイの両側に面した列車に2本の電磁レールが配置されています。これらのレールは、列車がコースから大きく外れるのを防ぎます(Lee、2006)。 MLXでは、ガイダンスは浮揚システムと組み合わされています。列車の両側にある浮上レールは互いに接続されています。この接続により、列車が片側に近づくと、復元力が発生し、列車が中央に向かって押し戻されます。したがって、MLXは浮上と誘導の両方を同時に行います(Lee、2006年)。 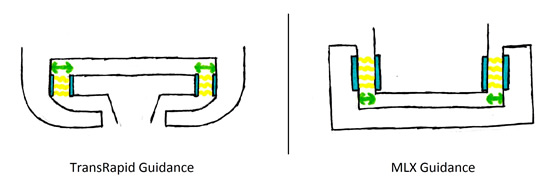
図8
トランスラピッドとMLXのガイダンスシステム。どちらも反発磁石を使用しています。出典:著者、Lee(2006)から派生。
リニアモーターカーの利点
リニアモーターカーの最も明らかな魅力は、従来の鉄道列車よりも速く移動できることです。唯一の商用高速リニアモーターカーである上海リニアモーターカーは、現在、現存する最速の列車です。最速の高速ホイールレール(320 kph Hayabusa、2013)よりも50 mph(80 kph)以上速く移動します。そして、それは最初のものにすぎません。列車とガイドウェイの間の摩擦がないため、従来の列車を制限していた多くの制限がなくなります。リニアモーターカーはここからのみ速くなります(Luu、2005)。磁気浮上式鉄道を魅力的にする他のより微妙な性質があります:
- 寿命:従来のホイールとレールは、時間の経過とともに大きなストレスを受けます。機能を維持するには、定期的に交換および修理する必要があります。リニアモーターカーでは、列車とガイドウェイが接触しないため、摩耗が大幅に少なくなります。この事実により、磁気浮上式鉄道部品の寿命は適切にはるかに長くなります(Powell、2003)。修理やメンテナンスは費用と時間がかかるため、経済的にはこれは非常にインセンティブになります。
- 安全性:これらの列車は車輪よりもはるかに速く移動するため、安全であると直感に反するように思われるかもしれません。カウンターパート。それにもかかわらず、それは真実です。リニアモーターカーは脱線することはほぼ不可能です(Luu、2005)。列車を線路から切り離すには、完全なガイドウェイの崩壊のようなものが必要です。さらに、天気はそれほど問題ではありません。列車は動きを摩擦に依存しないため、雪、氷、雨はほとんどまたはまったく影響を与えません(Luu、2005)。最後に、ガイドウェイを簡単に持ち上げることができます。列車が地上10フィートの線路を走っている場合、その経路上の物体と衝突する可能性は低くなります(Luu、2005)。
- エネルギー効率:浮揚のもう1つの利点は、これらの列車が摩擦によってエネルギーを失わないでください。これにより、効率が向上します(Wang2010)。エネルギー消費は、輸送システムの成功に不可欠です。運用コストの多くは、電力の支払いに費やされます。したがって、この効率の優位性は非常に重要です。ただし、リニアモーターカーはより効率的ですが、現在、最新の高速鉄道よりも実質的に効率的ではありません。ただし、このカテゴリでははるかに優れている可能性があります。
- 環境への影響:リニアモーターカーは、高速鉄道よりもタイトに曲がることができます。これにより、地形をより適切にナビゲートできるガイドウェイを構築できます(Wang2010)。パスは、環境への影響をできるだけ少なくするように設計できます。ガイドウェイはまた、レールよりも少ない面積を占めます(Wang2010)。これにより、環境への影響がさらに軽減されます。そして、前述のように、ガイドウェイは地面から簡単に持ち上げられます(Luu、2005)。植物も動物も同様に、列車がその上を移動し、すぐ隣でバレルが発生しない方が安全です。
- 騒音公害:輸送プロジェクトを検討する場合、騒音(妥当な範囲内)はそれほど大きくありません。経済または安全性としての懸念。ただし、ノイズリダクションは依然として肯定的な機能と見なされます。リニアモーターカーは現代の列車よりも静かなので、これは彼らに有利なもう1つのポイントです(Wang、2010)。
リニアモーターカーの欠点
多くの利点がありますが、そこにはリニアモーターカーがどこにでも建設されていない理由はまだあります。おそらく最大の理由は、リニアモーターカーのガイドウェイが既存の鉄道インフラと互換性がないことです。リニアモーターカーを実装しようとする組織は、最初から始めて、まったく新しいトラックのセットを構築する必要があります。これには非常に高い初期投資が含まれます(Coates、2004)。ガイドウェイのコストは時間の経過とともにレールよりも低くなりますが(Powell、2003)、事前に多くの費用をかけることを正当化することは困難です。もう1つの問題は、リニアモーターカーは高速で移動しますが、十分な速度で移動できない可能性があることです。高速鉄道がすでに設置されている国では、既存のソリューションよりもわずかに優れたシステムの実装に数十億ドルを費やしたくありません。これらの列車の市場は、現時点ではそれほど大きくありません。これらの列車が標準的な列車より優れていることは論争の余地がありません。とにかく、世界中で実装する価値がある前に、さらに多くの作業を行う必要があります。
リニアモーターカーの電気工学
蒸気機関以来、列車は伝統的に機械エンジニアの領域にありました。 。それらはすべてモーターと車軸、車輪とエンジンでした。しかし、リニアモーターカーの導入はその伝統を打ち破りました。これらの列車の開発には、物理学や化学など、機械工学以外のさまざまな分野からのインプットが必要でした。しかし、最も重要なことは、それが電気技師をテーブルに連れてきたことです。当初から、電気技師は磁気浮上技術の開発に大きく貢献してきました。電気技師のエリック・レイスウェイトは、リニアモーターカーの重要かつ必要な前身である最初のリニア誘導モーターを開発しました。リニアモーターカーの父であると多くの人が信じているヘルマン・ケンペルも電気技師でした。ドイツと日本の電気技師は、それぞれの国でリニアモーターカーのプログラムを確立するために働きました。そして今日、電気技師は技術をどんどん良くして、世界中の国々にアピールできるようにしています。リニアモーターカーには、驚くほど可動部品がほとんどありません。それらはすべて、電流、磁石、およびワイヤーループに関するものです。この分野のいくつかの重要なトピックは、電磁界と波、回路理論、フィードバック制御システム、および電力工学です。これらはすべて、電気技師の専門知識に該当します。したがって、この技術が直面する最大の問題を解決するために必要なのは電気技師です。列車はより速く、よりエネルギー効率の良いものにする必要があります。その間ずっと、それらは安全の境界内に十分に保たれる必要があります。ガイドウェイは、より安く、実装しやすく、おそらく既存のレールとの互換性を高める必要があります。制御システムは完璧にする必要があります。これらすべての問題やその他の問題は、電気技師が答えを解明することを求めています。
磁気浮上式鉄道の未来
磁気浮上式鉄道の技術は、将来に大きな期待を寄せています。現在よりも安く、速く、安全で、環境に優しい交通手段になる可能性があります。そして、何人かの電気技師の助けを借りて、それはこれらすべてのものになるでしょう。このテクノロジーは、都市間公共交通機関から国を越えた旅行まで、あらゆる用途に利用できます。長い地下管を建設し、管から空気を吸い出し、その中にリニアモーターカーを配置するという提案さえあります。この設定では、風の抵抗はほとんどないため、列車は音速を超える速度に簡単に到達できます(Thornton、2007年)。この技術が普及するまでには長い時間がかかるかもしれませんが、ある時点で普及することを否定することは困難です。利点は無視するのが難しいです。現在、使用されている商用リニアモーターカーは1つだけであり、それ以前のすべてをすでに凌駕しています。このテクノロジーは、将来に向けてどのように進化し、向上するのでしょうか。時間だけが教えてくれます。しかし、私たちが今、運輸革命の危機に瀕していることは非常にもっともらしいことです。私は、たとえば、磁石の浮揚ボックスで時速300マイルで田園地帯を滑空するのを楽しみにしています。
参考文献
推奨リンク
関連項目
- 自動運転車
- 再生可能エネルギー用の電気バッテリー
- インテリジェントインフラストラクチャ