Maglev : 자기 부상 열차
Maglev 열차는 자기를 사용하여 이동하는 선로 위로 부상합니다. 현대식 바퀴 달린 열차보다 빠르고 효율적이며 환경 친화적입니다. 언젠가는 자기 부상 기술이 전 세계적으로 보편화 될 것입니다. 이 기사에서는 이러한 열차의 역사, 작동 방식, 장점과 단점을 검토합니다. 또한 자기 부상 개발에서 전기 공학의 중요성과 전기 엔지니어가이 기술을 차세대 교통 혁명으로 만들 수있는 방법에 대해 설명합니다.
소개
바퀴가없는 기차를 상상해보세요. 트랙을 따라 구르는 대신 레일을 건드리지 않고 조용히 위로 떠서 출발지에서 목적지까지 부드럽게 미끄러집니다. 이것은 공상 과학 소설처럼 들릴지 모르지만이 기술의 사례는 이미 세계 여러 곳에 존재합니다. 그것들은 자기 부상 열차 (자기 부상이라는 용어에서 파생 됨)로 알려져 있습니다. 이 미래형 기관차는 여행을위한 새롭고 흥미로운 가능성을 제공합니다. 기존 운송 시스템보다 더 빠르고 안전하며 에너지 효율적일 가능성이 있습니다. 그러한 열차는 지금까지 거의 거의 없지만 전기 공학 커뮤니티에서 연구의 온상입니다. 결과적으로 자기 부상은 생각보다 더 빨리 일반화 될 수 있습니다.
자기 부상의 역사
자기 부상 기술의 기본 아이디어는 20 세기 초로 거슬러 올라갑니다. 전기 모터의 개발과 자기 연구를 포함하여이 열차의 토대를 마련하는 데 많은 작업이 진행되었습니다. 몇몇 과학자, 즉 Robert Goddard와 Emile Bachelet은 자석을 사용하여 떠 다니는 차량을 감히 제안했습니다 (Yadav, 2013). 1934 년에 Hermann Kemper라는 이름의 독일 남성이 자기 부상 열차의 첫 번째 개념에 대한 특허를 받았습니다 (Yadav, 2013). 이 아이디어가 실제로 나타나기 시작한 것은 1960 년대가 아니 었습니다. 이때 독일과 일본은 자기 부상의 잠재력을 연구하기 시작했습니다. 70 년대와 80 년대에 양국은 이러한 열차 개발에 큰 진전을 이루었습니다. 독일은 일련의 프로토 타입 자기 부상 시스템을 구축하고 테스트했으며 이들의 설계를 TransRapid라고 불렀습니다 (그림 1). 열차는 테스트 트랙에서 250mph (402kph) 이상의 속도를 달성했습니다 (Luu, 2005). 일본은 또한 ML-500과 나중에 MLU라는 두 가지 자체 설계 시리즈를 테스트했습니다. 그들의 열차는 시속 483km (300mph)를 초과 할 수있었습니다 (Luu, 2005). 
그림 1
독일 브레멘 근처의 테스트 센터에서의 트랜스 래피드. 출처 : © Stahlkocher / CC BY-SA 3.0
일본은 90 년대 이후에도 자기 부상 기술을 계속 개발했습니다. 그들은 2003 년에 350mph (563kph)를 돌파 한 MLX라는 새로운 시리즈를 테스트했습니다 (Yadav, 2013). 이 나라에는 상업 라인이 설립되지 않았지만 여전히 연구를 수행하고 있습니다. 독일에서는 1992 년 베를린과 함부르크를 연결하는 상업용 TransRapid 회선이 제안되었지만 2000 년에 정부는 프로젝트를 중단했습니다 (Luu, 2005). 그러나 중국인이 알아 차리고 상하이에 TransRapid 열차를 건설하도록 독일인에게 의뢰함에 따라 모든 것을 잃은 것은 아닙니다. 이 벤처의 결과로 탄생 한 상하이 자기 부상 열차 (그림 2)는 이제 상업적으로 사용되는 유일한 고속 자기 부상 열차입니다. 8 분 만에 30km (19 마일)의 거리를 승객을 태워 250mph (431kph) 이상의 최고 속도에 도달합니다 (Coates, 2004). 따라서 중국은 전세계 자기 부상 시장에서 빠르게 큰 역할을했습니다. 국가는 자기 부상 인프라의 개발을 계속할 계획입니다. 
그림 2
상하이 자기 부상 열차 (Pudong International Airport)에서 Longyang Road로가는 경로를 보여주는 Shanghai Transit Map 철도지도. 콜라주 출처 : © Alex Needham / Public Domain 및 Metropedia
어떻게 작동합니까?
Maglev 열차에는 바퀴 나 레일이 없습니다. 그림 3에서 볼 수 있듯이, 그들은 가이드 웨이를 가지고 있으며, 그것들은 그들을 건드리지 않고이 가이드 웨이 아래로 떠 있습니다. 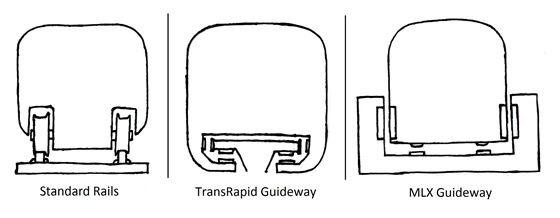
그림 3
휠 레일과 가이드 웨이 비교. 출처 : 저자, Lee (2006)에서 파생 됨.
자기 부상 기능을 달성하기위한 세 가지 필수 부분이 있습니다 : 부상, 추진 및 안내 (아래 참조). 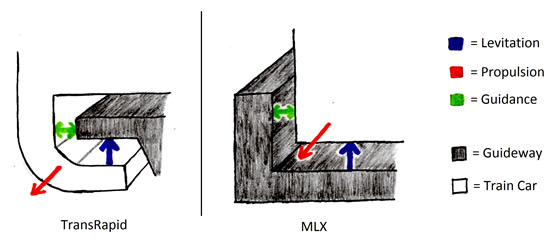
그림 4
자기 부상에서의 부양, 추진 및 안내. 출처 : 저자, Lee (2006).
Levitation
Levitation은 기차가 선로 위에 매달린 상태를 유지하는 능력입니다. 부상 기술에는 두 가지 중요한 유형이 있습니다.
- 전자기 서스펜션 (EMS) : EMS (그림 5)는 부상을 달성하기 위해 가이드 웨이와 열차에 배치 된 전자석의 인력을 사용합니다.이 방법의 장점은 Electrodynamic Suspension (아래에서 설명)보다 구현이 더 간단하고 제로 속도에서 부상을 유지한다는 것입니다. 단점은 시스템이 본질적으로 불안정하다는 것입니다. 고속에서는 열차와 가이드 웨이 사이의 정확한 거리를 유지하기가 어려워집니다. 이 거리를 유지할 수 없으면 기차가 공중에 뜨지 못하고 멈출 것입니다. 이를 설명하기 위해 EMS는 열차가 항상 안정적인지 확인하기 위해 복잡한 피드백 제어 시스템이 필요합니다 (Lee, 2006).
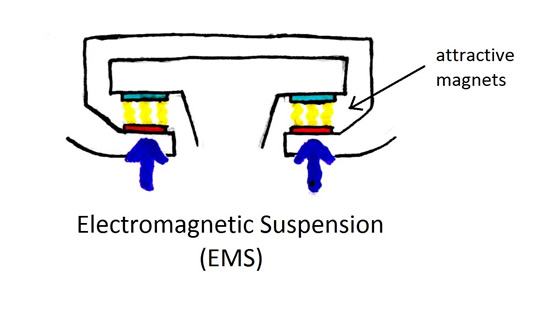
그림 5
EMS (Electromagnetic Suspension). 매력적인 자기력을 사용합니다. 출처 : 저자, Lee (2006)에서 파생.
- EDS (Electrodynamic Suspension) : EDS (그림 6)는 가이드 웨이와 기차에 배치 된 (초전도) 자석의 반발력을 사용하여 부상을 달성하십시오. 열차가 달리는 동안 자석은 서로 지나쳐 반발력을 발생시킵니다. 이 방법의 장점은 고속에서 매우 안정적이라는 것입니다. 기차와 가이드 웨이 사이의 정확한 거리를 유지하는 것은 문제가되지 않습니다 (Lee, 2006). 단점은 열차가 공중에 뜨기 위해서는 충분한 속도가 필요하다는 것입니다. 또한이 시스템은 훨씬 더 복잡하고 구현 비용이 많이 듭니다.
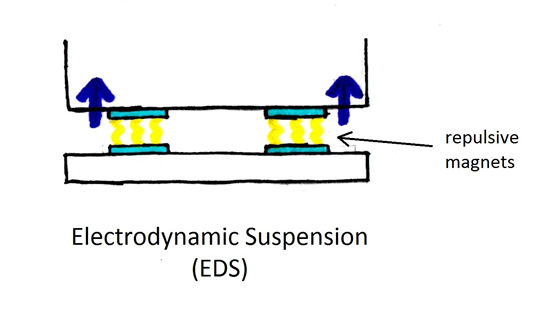
그림 6
Electrodynamic Suspension (EDS). 반발 자기력을 사용합니다. 출처 : 저자, Lee (2006)에서 파생.
추진
추진은 기차를 앞으로 나아가게하는 힘입니다. Maglev는 전기 선형 모터를 사용하여 추진력을 얻습니다. 일반 전기 회전 모터는 자성을 사용하여 토크를 생성하고 축을 회전합니다. 그것은 회전하는 부분 인 로터를 둘러싸는 고정 된 부분 인 고정자를 가지고 있습니다. 고정자는 회전 자기장을 생성하는 데 사용됩니다. 이 필드는 로터에 회전력을 유도하여 회전하게합니다. 선형 모터는 단순히 이것의 펼쳐진 버전입니다 (그림 7 참조). 고정자는 평평하게 놓여 있고 회전자는 그 위에 놓여 있습니다. 회전하는 자기장 대신 고정자는 길이를 따라 이동하는 자기장을 생성합니다. 마찬가지로 회전하는 힘 대신 회전자는 고정자를 아래로 당기는 선형 힘을 경험합니다. 따라서 전기 선형 모터는 직선으로 직접 운동을 생성합니다. 그러나이 모터는 회전자가 고정자 위에있는 동안에 만 힘을 생성 할 수 있습니다. 로터가 끝에 도달하면 움직이지 않습니다. 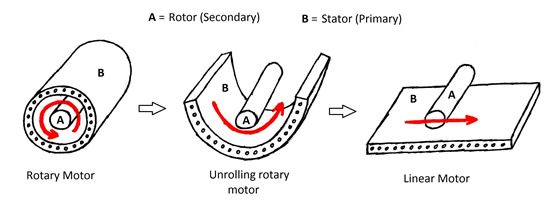
그림 7
회전 모터 대 선형 모터. 출처 : 저자, Lee (2006)에서 파생 됨.
리니어 모터를 설명 할 때 표준은 “고정자”대신 “1 차”, “회 전자”대신 “2 차”라는 용어를 사용하는 것입니다. 자기 부상 열차에서 2 차는 열차의 바닥에 부착되고 1 차는 가이드 웨이에 있습니다. 그래서 자기장은 가이드 웨이를 따라 보내지고 기차를 따라 가게됩니다. 어떤면에서 자기 부상 트랙의 전체 길이는 기차 모터의 일부로 간주 될 수 있습니다. 지금까지 설명한 시스템은 선형 유도 전동기 (LIM)입니다. 1 차의 자기장이 2 차의 자기장을 유도하기 때문에 소위 불립니다. 원래 필드와 유도 필드 사이의 상호 작용으로 인해 보조 필드가 당겨집니다. 그러나이 구성에서 2 차측은 항상 1 차측의 이동 필드보다 다소 뒤쳐집니다. 이 지연은 에너지 및 속도 손실의 원인입니다. 선형 동기 모터 (LSM)에서는 영구 자석을 2 차측에 부착하여 지연을 제거합니다. 2 차측은 이제 자체 고정 자기장을 생성하기 때문에 이동장과 동기화되어 1 차측으로 이동합니다. 따라서이 모터 변형의 이름이 붙여졌습니다 (Gieras, 2011). LSM은 더 빠르고 효율적이기 때문에 고속 자기 부상 열차에서 선택하는 모터입니다 (Lee, 2006).
안내
안내는 열차를 중앙에 두는 것입니다. 가이드 웨이. 고속 자기 부상의 경우이를 달성하기 위해 반발 자기력이 사용됩니다 (그림 8). TransRapid에는 가이드 웨이의 양쪽을 향하는 열차에 두 개의 전자기 레일이 있습니다. 이 레일은 열차가 코스에서 너무 멀리 이동하는 것을 방지합니다 (Lee, 2006). MLX에서 안내는 부상 시스템과 결합됩니다. 열차의 양쪽에있는 부양 레일은 서로 연결되어 있습니다. 이 연결을 통해 열차가 한쪽으로 가까워지면 복원력이 유도되어 중앙으로 다시 밀립니다. 따라서 MLX는 공중에 뜨고 동시에 유도된다 (Lee, 2006). 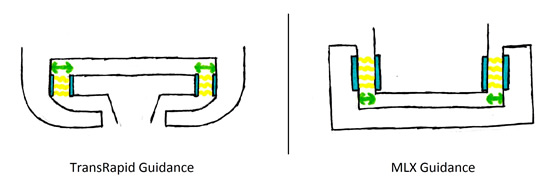
그림 8
Transrapid 및 MLX의 안내 시스템. 둘 다 반발 자석을 사용합니다. 출처 : 저자, Lee (2006).
자기 부상 열차의 이점
자기 부상 열차의 가장 분명한 매력은 전통적인 철도 열차보다 더 빨리 이동할 수 있다는 것입니다. 유일한 상업용 고속 자기 부상 열차 인 상하이 자기 부상 열차는 현존하는 가장 빠른 열차입니다.그것은 가장 빠른 고속 휠 레일 (320-kph Hayabusa, 2013)보다 50mph (80kph) 이상 빠르게 이동합니다. 그리고 그것은 첫 번째입니다. 기차와 가이드 웨이 사이의 마찰이 없기 때문에 전통적인 기차를 묶었 던 많은 한계가 사라졌습니다. 자기 부상은 여기서 만 더 빨라질 것입니다 (Luu, 2005). 자기 부상을 매력적으로 만드는 다른 더 미묘한 특성도 있습니다.
- 수명 : 기존의 바퀴와 레일은 시간이 지남에 따라 많은 스트레스를받습니다. 기능을 유지하려면 주기적으로 교체하고 수리해야합니다. 자기 부상에서는 기차와 가이드 웨이 사이에 접촉이 없으므로 마모가 훨씬 적습니다. 자기 부상 부품의 수명은이 사실로 인해 적절하게 훨씬 더 길어졌습니다 (Powell, 2003). 수리 및 유지 보수는 비용과 시간이 많이 소요되는 활동이므로 경제적으로 이것은 상당한 인센티브입니다.
- 안전 :이 열차는 바퀴가 달린 것보다 훨씬 더 빨리 여행하기 때문에 더 안전하다는 것은 직관에 반하는 것처럼 보일 수 있습니다. 대응. 그럼에도 불구하고 사실입니다. 자기 부상 열차는 탈선이 거의 불가능하다 (Luu, 2005). 트랙에서 기차를 분리하려면 완전한 가이드 웨이 붕괴와 같은 것이 필요합니다. 또한 날씨는 큰 문제가 아닙니다. 기차는 마찰에 의존하지 않기 때문에 눈, 얼음, 비는 거의 영향을 미치지 않습니다 (Luu, 2005). 마지막으로 가이드 웨이를 쉽게 올릴 수 있습니다. 기차가 지상 10 피트 위의 선로를 달리면 경로에있는 물체와 충돌 할 가능성이 적습니다 (Luu, 2005).
- 에너지 효율성 : 공중 부양의 또 다른 이점은 이러한 열차가 있다는 것입니다. 마찰로 인해 에너지를 잃지 마십시오. 이는 효율성 측면에서 이점을 제공합니다 (Wang 2010). 에너지 소비는 운송 시스템의 성공에 필수적입니다. 하나를 운영하는 데 드는 비용의 대부분은 전력을 지불하는 데 사용됩니다. 따라서 효율성면에서 이러한 우위가 매우 중요합니다. 그러나 자기 부상 열차는 더 효율적이지만 현재는 현대 고속 열차보다 훨씬 효율적이지 않습니다. 그러나 그들은이 범주에서 훨씬 우월 할 잠재력을 가지고 있습니다.
- 환경 영향 : 자기 부상 열차는 고속철도보다 더 좁은 회전을 할 수 있습니다. 이를 통해 지형을 훨씬 더 잘 탐색 할 수있는 가이드 웨이를 만들 수 있습니다 (Wang 2010). 경로는 가능한 한 환경에 거의 영향을주지 않도록 설계 할 수 있습니다. 가이드 웨이는 레일보다 면적이 적습니다 (Wang 2010). 이것은 환경 적 영향을 더욱 감소시킵니다. 그리고 앞서 언급했듯이 가이드 웨이는지면에서 쉽게 올라갈 수 있습니다 (Luu, 2005). 식물과 동물은 모두 기차가 그 위로 이동하고 바로 옆으로 통하지 않고 더 안전합니다.
- 소음 공해 : 운송 프로젝트를 고려할 때 소음 (합리적 범위 내)은 그다지 크지 않습니다. 경제 또는 안전에 대한 관심. 그러나 노이즈 감소는 여전히 긍정적 인 기능으로 간주됩니다. 자기 부상 열차는 현대 열차보다 조용하기 때문에 또 다른 장점입니다 (Wang, 2010).
자기 부상 열차의 단점
많은 장점이 있지만 자기 부상 열차가 모든 곳에 건설되지 않는 이유입니다. 아마도 가장 큰 이유는 자기 부상 가이드 웨이가 기존 철도 인프라와 호환되지 않기 때문일 것입니다. 자기 부상 시스템을 구현하려는 모든 조직은 처음부터 시작하여 완전히 새로운 트랙 세트를 만들어야합니다. 이것은 매우 높은 초기 투자를 포함합니다 (Coates, 2004). 가이드 웨이는 시간이 지남에 따라 레일보다 비용이 적게 들지만 (Powell, 2003) 너무 많은 초기 지출을 정당화하기는 어렵습니다. 또 다른 문제는 자기 부상 열차가 빠르게 이동하지만 충분히 빠르게 이동하지 않을 수 있다는 것입니다. 이미 고속 철도가 설치된 국가는 기존 솔루션보다 약간 더 나은 시스템을 구현하기 위해 수십억 달러를 지출하기를 원하지 않습니다. 이 열차의 시장은 현재 그다지 크지 않습니다. 이 열차가 표준 열차보다 우수하다는 점에 대해 논쟁하기는 어렵습니다. 그럼에도 불구하고 전 세계적으로 구현할 가치가 있기 전에 더 많은 작업을 수행해야합니다.
Maglev의 전기 공학
증기 엔진 이후로 기차는 전통적으로 기계 엔지니어의 영역에있었습니다. . 그들은 모두 모터와 축, 바퀴와 엔진이었습니다. 그러나 자기 부상 기술의 도입은 그 전통을 깨뜨 렸습니다. 이러한 열차를 개발하려면 물리 및 화학을 포함하여 기계 공학 이외의 다양한 분야의 입력이 필요했습니다. 그러나 가장 중요한 것은 전기 엔지니어를 테이블로 데려왔다는 것입니다. 처음부터 전기 엔지니어는 자기 부상 기술 개발에 주요 공헌을 해왔습니다. 전기 엔지니어 인 Eric Laithwaite는 자기 부상 열차의 중요하고 필수적인 선구자 인 최초의 선형 유도 모터를 개발했습니다. 자기 부상의 아버지라고 많은 사람들이 믿는 Hermann Kemper도 전기 기술자였습니다. 독일과 일본의 전기 엔지니어는 각 국가에서 자기 부상 프로그램을 구축하기 위해 노력했습니다.그리고 오늘날 전기 엔지니어는 기술을 더 좋고 더 좋게 만들어 전 세계 국가에 어필 할 수 있습니다. 자기 부상 열차에는 놀랍게도 움직이는 부품이 거의 없습니다. 그것들은 모두 전류, 자석 및 와이어 루프에 관한 것입니다. 이 분야의 몇 가지 중요한 주제는 전자기장과 파동, 회로 이론, 피드백 제어 시스템 및 전력 공학입니다. 이 모든 것은 전기 엔지니어의 전문 지식에 속합니다. 따라서이 기술이 직면 한 가장 큰 문제를 해결하는 데 필요한 것은 전기 엔지니어입니다. 열차는 더 빠르고 더 에너지 효율적이어야합니다. 그동안 그들은 안전의 경계 내에서 잘 유지되어야합니다. 가이드 웨이는 더 저렴하고 구현하기 쉬우 며 기존 레일과 더 잘 호환되어야합니다. 제어 시스템은 완벽해야합니다. 이러한 모든 문제와 더 많은 문제가 전기 엔지니어가 답을 찾아야한다고 요청하고 있습니다.
Maglev의 미래
Maglev 기술은 미래에 대한 큰 가능성을 가지고 있습니다. 그것은 오늘날 우리가 가지고있는 것보다 더 저렴하고, 더 빠르고, 더 안전하고, 더 친환경적인 운송 수단이 될 가능성이 있습니다. 그리고 일부 전기 엔지니어의 도움으로이 모든 것이 될 것입니다. 이 기술은 도시 간 대중 교통에서 국가 간 여행에 이르기까지 모든 분야에 적용 할 수 있습니다. 긴 지하 튜브를 만들고, 튜브에서 공기를 빨아 들이고, 자기 부상 열차를 그 안에 배치하는 제안도 있습니다. 이 설정에서는 사실상 바람 저항이 없으므로 기차는 소리의 속도를 초과하는 속도에 쉽게 도달 할 수 있습니다 (Thornton, 2007). 이 기술이 널리 보급되기까지는 오랜 시간이 걸릴 수 있지만 어느 시점에서 보급 될 것이라는 사실을 부정하기는 어렵습니다. 장점은 무시하기가 너무 어렵습니다. 현재 사용중인 상업용 자기 부상 열차는 단 하나 뿐이며, 이미 그 이전의 모든 것을가 렸습니다. 이 기술은 우리가 미래로 나아갈 때 어떻게 진화하고 향상 될까요? 단지 시간이 말해 줄 것이다. 그러나 우리가 지금 운송 혁명의 절정에 서있는 것은 매우 그럴듯합니다. 저는 자석 상자에서 시속 300 마일의 속도로 시골을 활공 할 수 있기를 기대합니다.