Maglev: magnetische zwevende treinen
Maglev-treinen gebruiken magnetisme om boven de sporen waarop ze rijden te zweven. Ze zijn sneller, efficiënter en milieuvriendelijker dan moderne wieltreinen. Het kan zijn dat binnenkort maglev-technologie over de hele wereld gemeengoed zal zijn. Dit artikel bespreekt de geschiedenis van deze treinen, hoe ze werken, evenals hun voor- en nadelen. Het bespreekt ook het belang van elektrotechniek bij de ontwikkeling van maglev, en hoe elektrotechnisch ingenieurs van deze technologie de volgende transportrevolutie kunnen maken.
Inleiding
Stel je een trein zonder wielen voor. In plaats van over de baan te rollen, zweeft hij er stilletjes boven en glijdt hij soepel van oorsprong naar bestemming zonder ooit een rail te raken. Dit klinkt misschien als sciencefiction, maar er zijn al voorbeelden van deze technologie op een aantal plaatsen in de wereld. Ze staan bekend als magneettreinen (afgeleid van de term magnetische levitatie). Deze futuristische locomotieven bieden veel nieuwe en opwindende mogelijkheden om te reizen. Ze kunnen sneller, veiliger en energiezuiniger zijn dan conventionele transportsystemen. Hoewel dergelijke treinen tot nu toe zeldzaam zijn, vormen ze een broeinest van onderzoek in de elektrotechnische gemeenschap. Als gevolg hiervan is maglev misschien eerder gemeengoed dan je zou denken.
Geschiedenis van Maglev
De fundamentele ideeën achter maglevtechnologie gaan terug tot het begin van de 20e eeuw. Er is veel werk verzet om de basis te leggen voor deze treinen, waaronder de ontwikkeling van elektromotoren en onderzoek naar magnetisme. Enkele wetenschappers, namelijk Robert Goddard en Emile Bachelet, durfden zelfs een voertuig voor te stellen dat zou drijven met behulp van magneten (Yadav, 2013). In 1934 kreeg een Duitse man met de naam Hermann Kemper een patent op het eerste concept van een magnetische, zwevende trein (Yadav, 2013). Pas in de jaren zestig begon het idee zich echt te manifesteren. Op dit moment begonnen Duitsland en Japan het potentieel van maglev te onderzoeken. In de jaren 70 en 80 hebben beide landen grote vooruitgang geboekt bij de ontwikkeling van deze treinen. Duitsland bouwde en testte een reeks prototype maglev-systemen en noemde hun ontwerp de TransRapid (figuur 1). De treinen bereikten snelheden van meer dan 250 mph (402 km / u) op de testbaan (Luu, 2005). Japan testte ook twee series van hun eigen ontwerpen, de ML-500 en later de MLU. Hun treinen konden 300 mph (483 km / u) overschrijden (Luu, 2005). 
Figuur 1
Transrapid op testcentrum in Duitsland nabij Bremen. Bron: © Stahlkocher / CC BY-SA 3.0
Japan zette de ontwikkeling van zijn maglev-technologie voort tot in de jaren 90 en daarna. Ze testten een nieuwe serie, de MLX genaamd, die in 2003 350 mph (563 km / u) brak (Yadav, 2013). In het land zijn geen commerciële lijnen opgericht, maar ze doen nog steeds onderzoek. In Duitsland werd in 1992 een commerciële TransRapid-lijn voorgesteld die Berlijn en Hamburg met elkaar verbond. In 2000 stopte de regering het project echter (Luu, 2005). Maar niet alles was verloren, want de Chinezen merkten het op en gaven de Duitsers de opdracht om een TransRapid-trein in Shanghai te bouwen. De Shanghai Maglev (figuur 2), die het resultaat is van deze onderneming, is nu de enige hogesnelheidstrein voor commercieel gebruik. Het vervoert passagiers een afstand van 19 mijl (30 km) in 8 minuten, en bereikt een topsnelheid van meer dan 250 mph (431 km / u) (Coates, 2004). Zo is China snel een grote speler geworden op de wereldwijde maglevmarkt. Het land is van plan de ontwikkeling van zijn maglev-infrastructuur voort te zetten. 
Figuur 2
Shanghai Maglev verlaat de Pudong International Airport, met de Shanghai Transit Map-spoorkaart die de route naar Longyang Road laat zien. Collagebronnen: © Alex Needham / Public Domain en Metropedia
Hoe werkt het?
Maglev-treinen hebben geen wielen of rails. Zoals getoond in figuur 3, hebben ze geleidebanen, en ze zweven langs deze geleidebanen zonder ze ooit te raken. 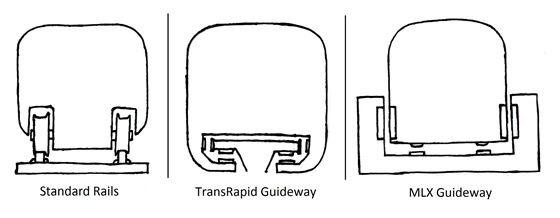
Figuur 3
Vergelijking van wiel-rail versus geleidebanen. Bron: auteur, afgeleid van Lee (2006).
Er zijn drie essentiële onderdelen om maglevfunctionaliteit te bereiken: levitatie, voortstuwing en begeleiding (zoals hieronder te zien). 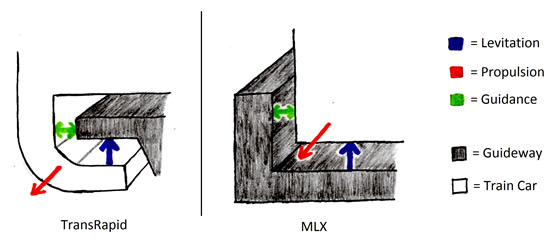
Figuur 4
Levitatie, voortstuwing en begeleiding in maglev. Bron: auteur, afgeleid van Lee (2006).
Levitatie
Levitatie is het vermogen van de trein om boven het spoor te blijven hangen. Er zijn twee belangrijke soorten levitatietechnologie:
- Elektromagnetische ophanging (EMS): EMS (Figuur 5) gebruikt de aantrekkingskracht van elektromagneten die op de geleidebaan en op de trein zijn geplaatst om levitatie te bereiken.De voordelen van deze methode zijn dat het eenvoudiger te implementeren is dan de elektrodynamische vering (hieronder besproken), en dat het levitatie handhaaft op nulsnelheid. De nadelen zijn dat het systeem inherent onstabiel is. Bij hoge snelheden wordt het moeilijk om de juiste afstand tussen trein en geleidebaan te behouden. Als deze afstand niet kan worden aangehouden, zal de trein niet zweven en knarsend tot stilstand komen. Om hier rekening mee te houden, heeft EMS complexe feedbackcontrolesystemen nodig om ervoor te zorgen dat de trein altijd stabiel is (Lee, 2006).
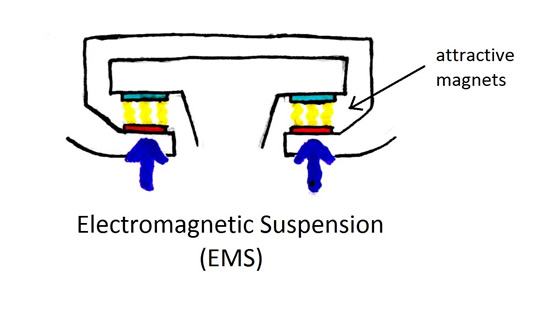
Figuur 5
Elektromagnetische ophanging (EMS). Maakt gebruik van aantrekkelijke magnetische krachten. Bron: auteur, afgeleid van Lee (2006).
- Elektrodynamische ophanging (EDS): EDS (Figuur 6) gebruikt de afstotende kracht van (supergeleidende) magneten die op de geleidebaan en op de trein zijn geplaatst levitatie bereiken. De magneten bewegen langs elkaar terwijl de trein rijdt en genereren de afstotende kracht. De voordelen van deze methode zijn dat deze ongelooflijk stabiel is bij hoge snelheden. Het aanhouden van de juiste afstand tussen trein en geleidebaan is geen probleem (Lee, 2006). De nadelen zijn dat er voldoende snelheid moet worden opgebouwd om de trein überhaupt te laten zweven. Bovendien is dit systeem veel complexer en duurder om te implementeren.
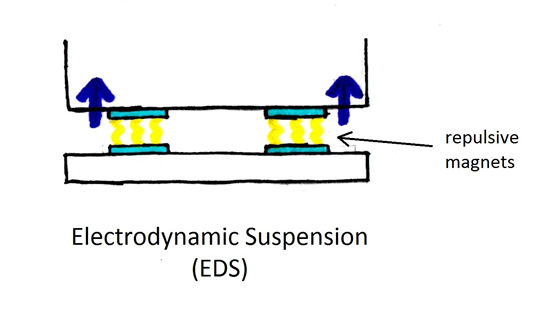
Figuur 6
Elektrodynamische vering (EDS). Gebruikt afstotende magnetische krachten. Bron: auteur, afgeleid van Lee (2006).
Voortstuwing
Voortstuwing is de kracht die de trein voortstuwt. Maglev gebruikt een elektrische lineaire motor om voortstuwing te bereiken. Een normale elektrische rotatiemotor gebruikt magnetisme om koppel te creëren en een as te laten draaien. Het heeft een stationair stuk, de stator, dat een roterend stuk, de rotor, omgeeft. De stator wordt gebruikt om een roterend magnetisch veld op te wekken. Dit veld veroorzaakt een rotatiekracht op de rotor, waardoor deze gaat draaien. Een lineaire motor is hier simpelweg een uitgerolde versie van (zie figuur 7). De stator is plat gelegd en de rotor rust erboven. In plaats van een roterend magnetisch veld, wekt de stator een veld op dat zich over zijn lengte verplaatst. Evenzo ervaart de rotor in plaats van een roterende kracht een lineaire kracht die hem langs de stator trekt. Een elektrische lineaire motor produceert dus direct beweging in een rechte lijn. Deze motor kan echter alleen een kracht produceren als de rotor zich boven de stator bevindt. Zodra de rotor het einde heeft bereikt, stopt hij met bewegen. 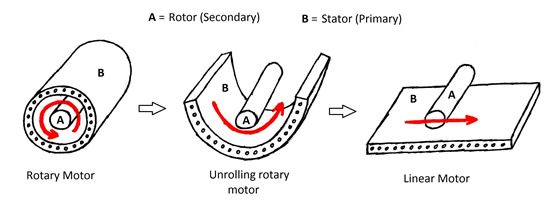
Figuur 7
Roterende motor versus lineaire motor. Bron: auteur, afgeleid van Lee (2006).
Bij het beschrijven van een lineaire motor is het standaard om de term ‘primair’ te gebruiken in plaats van ‘stator’ en ‘secundair’ in plaats van ‘rotor’. In magneettreinen is de secundaire aan de onderkant van de treinwagons bevestigd en de primaire in de geleidebaan. Er wordt dus een magnetisch veld langs de geleidebaan gestuurd en het trekt de trein erachteraan. In zekere zin kan de gehele lengte van een magneetspoor worden beschouwd als onderdeel van de motor van de trein. Het systeem dat tot nu toe is beschreven, is een lineaire inductiemotor (LIM). Het wordt zo genoemd omdat het magnetische veld in het primaire veld een magnetisch veld in het secundaire induceert. Het is de interactie tussen het oorspronkelijke veld en het geïnduceerde veld dat ervoor zorgt dat het secundaire wordt meegetrokken. In deze configuratie blijft de secundaire echter altijd enigszins achter bij het bewegende veld in de primaire. Deze vertraging is een bron van energie en snelheidsverlies. In een lineaire synchrone motor (LSM) wordt de vertraging verwijderd door permanente magneten aan de secundaire te bevestigen. Omdat het secundaire nu zijn eigen stationaire magnetische veld produceert, gaat het synchroon met het bewegende veld langs het primaire veld – vandaar de naam voor deze variant van de motor (Gieras, 2011). Omdat LSM’s sneller en efficiënter zijn, zijn ze de motor bij uitstek in hogesnelheidstreinen (Lee, 2006).
Begeleiding
Begeleiding houdt de trein gecentreerd over de geleidebaan. Voor een hogesnelheidsmagneet worden afstotende magnetische krachten gebruikt om dit te bereiken (Figuur 8). In de TransRapid zijn er twee elektromagnetische rails aan weerszijden van de geleidebaan op de trein geplaatst. Deze rails zorgen ervoor dat de trein niet te ver uit koers beweegt (Lee, 2006). In de MLX is begeleiding gekoppeld aan het levitatiesysteem. De levitatierails aan weerszijden van de trein zijn met elkaar verbonden. Door deze verbinding wordt, wanneer de trein dichter naar één kant beweegt, een terugstelkracht uitgeoefend die hem terug naar het midden duwt. De MLX wordt dus tegelijkertijd zwevend en geleid (Lee, 2006). 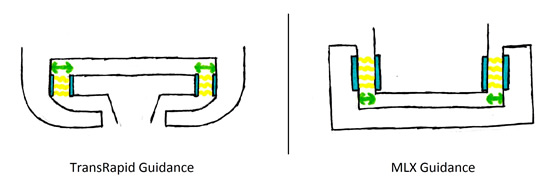
Figuur 8
Begeleidingssysteem van Transrapid en MLX. Beiden gebruiken afstotende magneten. Bron: auteur, afgeleid van Lee (2006).
Voordelen van Maglev
De meest voor de hand liggende attractie van maglev-treinen is dat ze sneller kunnen reizen dan traditionele treinstellen. De enige commerciële maglev met hoge snelheid, de Shanghai Maglev, is nu de snelste trein die er bestaat.Hij reist meer dan 80 km / u sneller dan de snelste hogesnelheidswielrail (320 km / u Hayabusa, 2013). En het is pas de eerste. Het gebrek aan wrijving tussen de trein en de geleidebaan heft veel beperkingen op die aan traditionele treinen gebonden waren. Maglev wordt vanaf hier alleen maar sneller (Luu, 2005). Er zijn andere, meer subtiele eigenschappen die maglev ook aantrekkelijk maken:
- Lange levensduur: conventionele wielen en rails ondergaan in de loop van de tijd veel stress. Ze moeten periodiek worden vervangen en gerepareerd om functioneel te blijven. Bij maglev is er geen contact tussen trein en geleidebaan, dus er is aanzienlijk minder slijtage. De levensduur van magneetzweefonderdelen is hierdoor veel langer (Powell, 2003). Economisch gezien is dit een behoorlijke stimulans, aangezien reparatie en onderhoud kostbare en tijdrovende activiteiten zijn.
- Veiligheid: het lijkt misschien contra-intuïtief dat deze treinen veiliger zijn, omdat ze zoveel sneller reizen dan hun wielen tegenhangers. Het is niettemin waar. Maglev-treinen kunnen bijna niet ontsporen (Luu, 2005). Er zou zoiets als een volledige instorting van de geleidebaan nodig zijn om een trein van zijn spoor te scheiden. Bovendien is het weer niet zo’n groot probleem. Aangezien de treinen voor beweging niet afhankelijk zijn van wrijving, hebben sneeuw, ijs en regen weinig tot geen effect (Luu, 2005). Ten slotte is het eenvoudig om de geleidebanen omhoog te brengen. Als de treinen op drie meter boven de grond rijden, is er een kleinere kans op een botsing met een object op zijn pad (Luu, 2005).
- Energie-efficiëntie: een ander voordeel van levitatie is dat deze treinen verlies geen energie door wrijving. Dit geeft hen een voordeel in efficiëntie (Wang 2010). Energieverbruik is essentieel voor het succes van een transportsysteem. Een groot deel van de exploitatiekosten gaat naar het betalen van stroom. Daarom is deze voorsprong in efficiëntie erg belangrijk. Magneettreinen zijn weliswaar efficiënter, maar momenteel niet wezenlijk efficiënter dan moderne hogesnelheidstreinen. Ze hebben echter het potentieel om veruit superieur te zijn in deze categorie.
- Milieu-impact: Maglev-treinen kunnen krappere bochten maken dan hogesnelheidsrails. Hierdoor kunnen geleidebanen worden gebouwd die veel beter door het terrein kunnen navigeren (Wang 2010). De paden kunnen zo worden aangelegd dat ze zo min mogelijk effect hebben op het milieu. Geleidingsbanen nemen ook minder oppervlakte in beslag dan rails (Wang 2010). Dit vermindert de milieu-impact verder. En, zoals eerder opgemerkt, kunnen geleidebanen gemakkelijk van de grond worden getild (Luu, 2005). Planten en dieren zijn veiliger als de trein erboven rijdt, en niet naast hen voorbij raast.
- Geluidsvervuiling: bij het overwegen van een transportproject is het geluid (binnen redelijke grenzen) niet zo groot een zorg als economie of veiligheid. Ruisonderdrukking wordt echter nog steeds als een positief kenmerk beschouwd. Maglev-treinen zijn stiller dan moderne treinen, dus dit is een ander punt in hun voordeel (Wang, 2010).
Nadelen van Maglev
Hoewel er veel voordelen zijn, zijn nog steeds redenen waarom magneettreinen niet overal worden gebouwd. Misschien wel de grootste reden is dat magneetzweefbanen niet compatibel zijn met de bestaande spoorweginfrastructuur. Elke organisatie die probeert een maglev-systeem te implementeren, moet helemaal opnieuw beginnen en een volledig nieuwe reeks tracks bouwen. Dit brengt een zeer hoge initiële investering met zich mee (Coates, 2004). Hoewel geleidebanen in de loop van de tijd minder kosten dan rails (Powell, 2003), is het moeilijk te rechtvaardigen dat vooraf zoveel geld wordt uitgegeven. Een ander probleem is dat magneettreinen snel reizen, maar misschien niet snel genoeg. Landen met al hogesnelheidssporen willen geen miljarden dollars uitgeven aan het implementeren van een systeem dat maar marginaal beter is dan de bestaande oplossing. De markt voor deze treinen is op dit moment gewoon niet erg groot. Het valt moeilijk te betwisten dat deze treinen superieur zijn aan standaardtreinen. Hoe dan ook, er moet nog meer worden gedaan voordat het de moeite waard is om ze wereldwijd te implementeren.
Elektrotechniek in Maglev
Sinds de stoommachine zijn treinen van oudsher in het domein van werktuigbouwkundigen . Het waren allemaal motoren en assen, wielen en motoren. De introductie van maglev-technologie heeft die traditie echter doorbroken. Voor de ontwikkeling van deze treinen was input nodig van een aantal andere vakgebieden dan werktuigbouwkunde, waaronder natuurkunde en scheikunde. Maar het belangrijkste is dat het elektrotechnici aan de tafel heeft gezet. Vanaf het begin hebben elektrotechnici een belangrijke bijdrage geleverd aan de ontwikkeling van magneetzweeftechnologie. Eric Laithwaite, een elektrotechnisch ingenieur, ontwikkelde de eerste lineaire inductiemotor, een belangrijke en noodzakelijke voorloper van magneettreinen. Hermann Kemper, van wie velen denken dat hij de vader van maglev is, was ook een elektrotechnisch ingenieur. Duitse en Japanse elektrotechnici werkten om de maglev-programma’s in hun respectieve landen op te zetten.En vandaag maken elektrotechnici de technologie steeds beter, zodat deze landen over de hele wereld kan aanspreken. Maglev-treinen hebben verrassend weinig bewegende delen. Ze gaan allemaal over elektrische stromen, magneten en draadlussen. Enkele belangrijke onderwerpen op dit gebied zijn elektromagnetische velden en golven, circuittheorie, feedbackcontrolesystemen en energietechniek. Deze vallen allemaal onder de expertise van elektrotechnici. Daarom zijn het elektrotechnici die nodig zijn om de grootste problemen waarmee deze technologie wordt geconfronteerd, op te lossen. De treinen moeten sneller en energiezuiniger worden gemaakt. Al die tijd moeten ze binnen de grenzen van veiligheid worden gehouden. De geleidebanen moeten goedkoper, eenvoudiger te implementeren en wellicht beter compatibel worden met bestaande rails. De controlesystemen moeten vlekkeloos worden gemaakt. Al deze problemen en meer vragen om een elektrotechnisch ingenieur om hun antwoorden te ontrafelen.
De toekomst van Maglev
Maglev-technologie is een grote belofte voor de toekomst. Het heeft de potentie om een goedkopere, snellere, veiligere en groenere vorm van transport te zijn dan we nu hebben. En met de hulp van enkele elektrotechnici zullen het al deze dingen worden. Er zijn mogelijke toepassingen voor deze technologie in alles, van openbaar vervoer in de stad tot reizen over het hele land. Er zijn zelfs voorstellen om lange ondergrondse buizen te bouwen, de lucht uit de buizen te zuigen en er magneettreinen in te plaatsen. In deze setting zou er vrijwel geen windweerstand zijn, dus een trein zou gemakkelijk snelheden kunnen halen die hoger zijn dan de geluidssnelheid (Thornton, 2007). Hoewel het lang kan duren voordat deze technologie de overhand krijgt, is het moeilijk te ontkennen dat het op een gegeven moment zal heersen. De voordelen zijn te moeilijk om te negeren. Op dit moment is er maar één commerciële magneettrein in gebruik en die heeft al alles wat eraan voorafging overschaduwd. Hoe zal deze technologie evolueren en verbeteren naarmate we de toekomst ingaan? De tijd zal het leren. Maar het is zeer aannemelijk dat we nu aan de vooravond staan van een transportrevolutie. Ik kijk er bijvoorbeeld naar uit om met 300 mph over het platteland te zweven in een zwevende doos met magneten.
Bibliografie
Suggested Links
Zie ook
- Autonome voertuigen
- Elektrische batterijen voor hernieuwbare energie
- Intelligente infrastructuur