Maglev: Magnetiska svävande tåg
Maglev-tåg använder magnetism för att sväva över spåren de kör. De är snabbare, effektivare och mer miljövänliga än moderna hjultåg. Det kan vara så att en dag snart kommer maglev-teknik att vara vanligt i hela världen. Den här artikeln granskar tågens historia, hur de fungerar, liksom deras fördelar och nackdelar. Den diskuterar också vikten av elektroteknik för att utveckla maglev och hur elektrotekniker kan göra denna teknik till nästa transportrevolution.
Inledning
Föreställ dig ett tåg utan hjul. Istället för att rulla längs banan flyter den tyst ovanför och glider smidigt från ursprung till destination utan att någonsin röra vid en skena. Detta kan låta som science fiction, men förekomster av denna teknik finns redan på ett antal platser i världen. De är kända som maglevtåg (härledda från termen magnetisk levitation). Dessa futuristiska lok erbjuder många nya och spännande möjligheter att resa. De har potential att vara snabbare, säkrare och mer energieffektiva än konventionella transportsystem. Även om sådana tåg är få och långt ifrån nu, är de en grogrund för forskning inom elektroteknik. Som ett resultat kan maglev vara vanligt tidigare än du tror.
Maglevs historia
De grundläggande idéerna bakom maglev-tekniken kan spåras tillbaka till början av 1900-talet. Mycket arbete gjordes för att lägga grunden för dessa tåg, inklusive utveckling av elmotorer och forskning inom magnetism. Några forskare, nämligen Robert Goddard och Emile Bachelet, vågade till och med föreslå ett fordon som skulle flyta med magneter (Yadav, 2013). År 1934 fick en tysk man vid namn Hermann Kemper patent på det första konceptet med ett magnetiskt, svävande tåg (Yadav, 2013). Det var först på 1960-talet som idén verkligen började manifestera sig. Vid denna tid började Tyskland och Japan undersöka potentialen i maglev. Under 70- och 80-talen gjorde båda länderna stora framsteg när det gäller att utveckla dessa tåg. Tyskland byggde och testade en rad prototyp-maglevsystem och kallade deras design TransRapid (figur 1). Tågen uppnådde hastigheter över 250 km / h (402 km / h) på testspåret (Luu, 2005). Japan testade också två serier av sina egna mönster, kallade ML-500 och senare MLU. Deras tåg kunde överstiga 300 km / h (Luu, 2005). 
Figur 1
Transrapid på testcenter i Tyskland nära Bremen. Källa: © Stahlkocher / CC BY-SA 3.0
Japan fortsatte utvecklingen av sin maglev-teknik fram till 90-talet och därefter. De testade en ny serie, kallad MLX, som bröt 350 mph (563 km / h) 2003 (Yadav, 2013). Inga kommersiella linjer har etablerats i landet, men de bedriver fortfarande forskning. I Tyskland föreslogs en kommersiell TransRapid-linje som förbinder Berlin och Hamburg 1992. Emellertid stängde regeringen 2000 projektet (Luu, 2005). Inte allt gick dock förlorat, eftersom kineserna noterade och uppmanade tyskarna att bygga ett TransRapid-tåg i Shanghai. Shanghai Maglev (figur 2), som härrör från denna satsning, är nu det enda höghastighetstågsmagnet i kommersiellt bruk. Det transporterar passagerare ett avstånd på 30 km på 8 minuter och når en toppfart på över 250 km / h (Coates, 2004). Således har Kina snabbt blivit en stor aktör på den världsomspännande maglevmarknaden. Landet planerar att fortsätta utvecklingen av sin maglev-infrastruktur. 
Figur 2
Shanghai Maglev lämnar Pudong International Airport, med järnvägskartan för Shanghai Transit Map som visar vägen till Longyang Road. Collagekällor: © Alex Needham / Public Domain och Metropedia
Hur fungerar det?
Maglev-tåg har varken hjul eller räls. Som visas i figur 3 har de styrvägar, och de flyter nerför dessa styrvägar utan att röra vid dem. 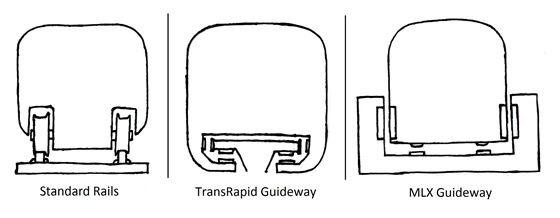
Figur 3
Jämförelse mellan hjulskenor och vägledningar. Källa: Författare, härledd från Lee (2006).
Det finns tre viktiga delar för att uppnå maglev-funktionalitet: levitation, framdrivning och vägledning (se nedan). 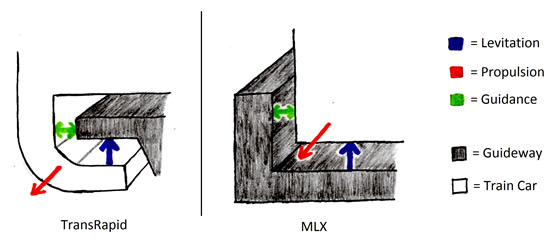
Figur 4
Levitation, framdrivning och vägledning i maglev. Källa: Författare, härledd från Lee (2006).
Levitation
Levitation är tågets förmåga att hålla sig upphängd ovanför spåret. Det finns två viktiga typer av levitationsteknologi:
- Elektromagnetisk upphängning (EMS): EMS (figur 5) använder den attraktiva kraften hos elektromagneter placerade på styrbanan och på tåget för att uppnå levitation.Fördelarna med denna metod är att den är enklare att implementera än elektrodynamisk upphängning (diskuteras nedan), och att den bibehåller svävning vid noll hastighet. Nackdelarna är att systemet i sig är instabilt. Vid höga hastigheter blir det svårt att hålla rätt avstånd mellan tåg och styrväg. Om detta avstånd inte kan hållas misslyckas tåget att sväva och stoppas. För att redogöra för detta kräver EMS komplexa feedback-kontrollsystem för att säkerställa att tåget alltid är stabilt (Lee, 2006).
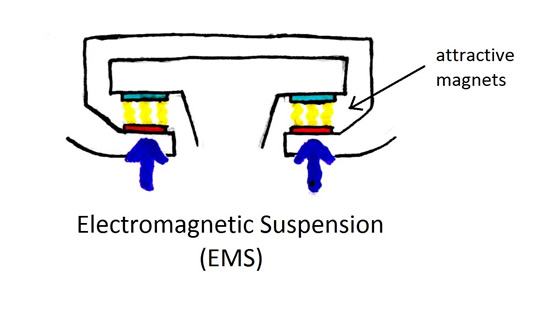
Figur 5
Elektromagnetisk upphängning (EMS). Använder attraktiva magnetiska krafter. Källa: Författare, härledd från Lee (2006).
- Elektrodynamisk upphängning (EDS): EDS (Figur 6) använder den frånstötande kraften hos (supraledande) magneter placerade på styrbanan och på tåget för att uppnå levitation. Magneterna rör sig förbi varandra medan tåget går och genererar en motbjudande kraft. Fördelarna med denna metod är att den är otroligt stabil vid höga hastigheter. Att upprätthålla rätt avstånd mellan tåg och väg är inte ett problem (Lee, 2006). Nackdelarna är att tillräcklig hastighet måste byggas upp för att tåget ska kunna sväva alls. Dessutom är detta system mycket mer komplext och kostsamt att implementera.
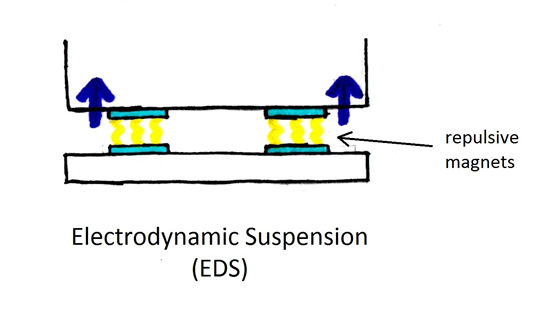
Figur 6
Elektrodynamisk upphängning (EDS). Använder avstötande magnetiska krafter. Källa: Författare, härledd från Lee (2006).
Framdrivning
Framdrivning är den kraft som driver tåget framåt. Maglev använder en elektrisk linjärmotor för att uppnå framdrivning. En vanlig elektrisk roterande motor använder magnetism för att skapa vridmoment och snurra en axel. Den har ett stationärt stycke, statorn, som omger ett roterande stycke, rotorn. Statorn används för att generera ett roterande magnetfält. Detta fält inducerar en rotationskraft på rotorn, vilket får den att snurra. En linjär motor är helt enkelt en avrullad version av denna (se figur 7). Statorn läggs platt och rotorn vilar ovanför den. Istället för ett roterande magnetfält genererar statoren ett fält som rör sig längs dess längd. På samma sätt, istället för en roterande kraft, upplever rotorn en linjär kraft som drar den ner i statorn. Således producerar en elektrisk linjär motor direkt rörelse i en rak linje. Denna motor kan emellertid bara producera en kraft medan rotorn är ovanför statorn. När rotorn har nått slutet slutar den röra sig. 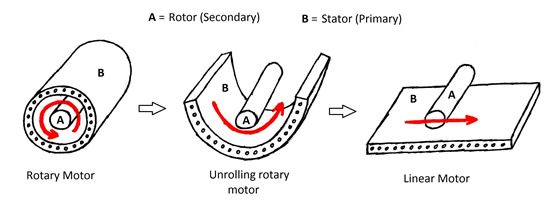
Figur 7
Roterande motor kontra linjär motor. Källa: Författare, härledd från Lee (2006).
När man beskriver en linjär motor är standarden att använda termen ”primär” istället för ”stator” och ”sekundär” istället för ”rotor.” I maglevtåg är sekundärfästet fäst på tågbilarnas botten och det primära är i styrbanan. Så ett magnetfält skickas ner i styrbanan och det drar tåget efter sig. På ett sätt då kan hela längden på ett maglevspår betraktas som en del av tågets motor. Systemet som hittills har beskrivits är en linjär induktionsmotor (LIM). Det kallas så för att magnetfältet i det primära inducerar ett magnetfält i det sekundära. Det är samspelet mellan det ursprungliga fältet och det inducerade fältet som får sekundäret att dras med. I den här konfigurationen ligger dock sekundären alltid något bakom det rörliga fältet i det primära. Denna försening är en källa till energi och hastighetsförlust. I en linjär synkronmotor (LSM) avlägsnas fördröjningen genom att fästa permanentmagneter på sekundärmotorn. Eftersom sekundärproduktionen nu producerar sitt eget stationära magnetfält, färdas det ner i primärområdet synkroniserat med det rörliga fältet – därav namnet på denna variant av motor (Gieras, 2011). Eftersom LSM är snabbare och mer effektiva är de den motor du väljer i höghastighetståg (Lee, 2006).
Vägledning
Vägledning är det som håller tåget centrerat över styrväg. För höghastighetsmagnlev används avstötande magnetiska krafter för att uppnå detta (Figur 8). I TransRapid finns två elektromagnetiska skenor placerade på tåget mot vardera sidan av styrbanan. Dessa skenor hindrar tåget från att gå för långt från kurs (Lee, 2006). I MLX är vägledning kopplad till levitationssystemet. Levitationsskenorna på vardera sidan av tåget är anslutna till varandra. Genom denna anslutning, när tåget rör sig närmare ena sidan, induceras en återställningskraft som skjuter tillbaka mot centrum. Således lyfts och styrs MLX samtidigt (Lee, 2006). 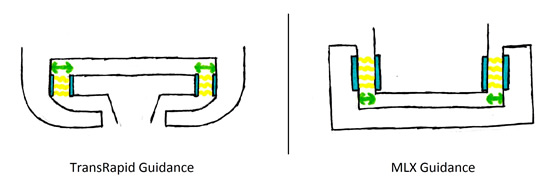
Figur 8
Vägledningssystem för Transrapid och MLX. Båda använder avstötande magneter. Källa: Författare, härledd från Lee (2006).
Fördelarna med Maglev
Den mest uppenbara attraktionen för maglevtåg är att de kan resa snabbare än traditionella tåg. Den enda kommersiella höghastighetsmagnlev, Shanghai Maglev, är nu det snabbaste tåget som finns.Det körs över 50 km / h snabbare än den snabbaste höghastighetshjulskenan (320 km / h Hayabusa, 2013). Och det är bara det första. Bristen på friktion mellan tåget och styrbanan tar bort många gränser som bundna traditionella tåg. Härifrån kommer Maglev bara snabbare (Luu, 2005). Det finns andra, mer subtila egenskaper som också gör maglev attraktiva:
- Lång livslängd: Konventionella hjul och skenor genomgår mycket stress över tiden. De måste bytas ut och repareras regelbundet för att förbli funktionella. I maglev finns det ingen kontakt mellan tåg och styrväg, så det blir betydligt mindre slitage. Livslängden för maglevdelar är lämpligt mycket längre på grund av detta faktum (Powell, 2003). Ekonomiskt är detta ett ganska incitament, eftersom reparation och underhåll är kostsamma och tidskrävande aktiviteter.
- Säkerhet: Det kan tyckas kontraintuitivt att dessa tåg är säkrare eftersom de reser så mycket snabbare än sina hjul motsvarigheter. Det är ändå sant. Maglev-tåg är nästan omöjliga att spåra ur (Luu, 2005). Det skulle ta ungefär som en fullständig kollaps för styrvägen för att dela ett tåg från spåret. Dessutom är vädret inte mycket av ett problem. Eftersom tågen inte är beroende av friktion för rörelse, orsakar snö, is och regn liten eller ingen effekt (Luu, 2005). Slutligen är det enkelt att lyfta styrvägarna. Om tågen går på spår tio meter över marken är det mindre risk för kollision med ett föremål på dess väg (Luu, 2005).
- Energieffektivitet: En annan fördel med levitation är att dessa tåg tappa ingen energi till friktion. Detta ger dem en fördel i effektivitet (Wang 2010). Energiförbrukning är avgörande för att ett transportsystem ska lyckas. Mycket av driftskostnaderna går till att betala för ström. Därför är denna fördel i effektivitet mycket viktig. Medan maglevståg är effektivare är de för närvarande dock inte väsentligt effektivare än moderna höghastighetståg. De har dock potential att vara mycket överlägsna i denna kategori.
- Miljöpåverkan: Maglev-tåg kan göra snävare svängar än höghastighetsskenor. Detta gör det möjligt att bygga ledvägar som kan navigera i terrängen mycket bättre (Wang 2010). Banorna kan konstrueras så att de påverkar miljön så lite som möjligt. Riktvägar tar också mindre yta än räls gör (Wang 2010). Detta minskar miljöpåverkan ytterligare. Och som nämnts tidigare lyfts vägar lätt från marken (Luu, 2005). Växter och djur är säkrare med tåget som reser sig ovanför dem och tappar inte precis bredvid dem.
- Bullerföroreningar: När man överväger ett transportprojekt är buller (inom rimliga gränser) inte lika stort ett problem som ekonomi eller säkerhet. Men bullerreducering anses fortfarande vara en positiv egenskap. Maglev-tågen är tystare än samtida tåg, så detta är en annan punkt i deras favör (Wang, 2010).
Nackdelar med Maglev
Även om det finns många uppåtriktade, finns det är fortfarande skäl till varför det inte byggs maglevtåg överallt. Kanske är den största anledningen att maglev-styrvägar inte är kompatibla med befintlig järnvägsinfrastruktur. Varje organisation som försöker implementera ett maglevsystem måste börja från grunden och bygga en helt ny uppsättning spår. Detta innebär en mycket hög initialinvestering (Coates, 2004). Även om ledvägar kostar mindre än räls över tid (Powell, 2003), är det svårt att motivera att spendera så mycket på förhand. Ett annat problem är att maglevtåg reser snabbt, men de kanske inte reser tillräckligt snabbt. Länder som redan har höghastighetsskenor vill inte spendera miljarder dollar på att implementera ett system som bara är marginellt bättre än den befintliga lösningen. Marknaden för dessa tåg är för närvarande inte särskilt stor. Det är svårt att bestrida att dessa tåg är överlägsna standardtågen. Oavsett, behöver mer arbete göras innan det är värt att implementera dem över hela världen.
Elektroteknik i Maglev
Ända sedan ångmotorn har tåg traditionellt varit inom maskiningenjörernas område . De var alla motorer och axlar, hjul och motorer. Introduktionen av maglev-teknik har dock brutit den traditionen. Utvecklingen av dessa tåg har krävt input från ett antal andra områden än mekanik, inklusive fysik och kemi. Det viktigaste är dock att det har fört elektriska ingenjörer till bordet. Från början har elektriska ingenjörer bidragit mycket till utvecklingen av maglev-teknik. Eric Laithwaite, en elektrotekniker, utvecklade den första linjära induktionsmotorn, en viktig och nödvändig föregångare till maglevtåg. Hermann Kemper, som många tror är far till maglev, var också en elektrotekniker. Tyska och japanska elingenjörer arbetade för att upprätta maglevprogrammen i sina respektive länder.Och idag gör eltekniker tekniken bättre och bättre så att den kan tilltala länder över hela världen. Maglev-tåg har förvånansvärt få rörliga delar. De handlar om elektriska strömmar, magneter och trådöglor. Några viktiga ämnen för fältet är elektromagnetiska fält och vågor, kretsteori, återkopplingsstyrsystem och kraftteknik. Alla dessa faller under elteknikerns expertis. Därför är det elektriska ingenjörer som behövs för att lösa de största problemen som denna teknik står inför. Tågen måste göras snabbare och mer energieffektiva. Under tiden måste de hållas inom säkerhetsgränserna. Styrvägarna måste göras billigare, enklare att implementera och kanske mer kompatibla med befintliga skenor. Styrsystemen måste göras felfria. Alla dessa frågor och mer uppmanar en elektrotekniker att komma till rätta med sina svar.
Framtiden för Maglev
Maglev-tekniken ger ett stort löfte för framtiden. Det har potential att vara en billigare, snabbare, säkrare och grönare transportform än vi har idag. Och med hjälp av vissa elektriska ingenjörer kommer det att bli alla dessa saker. Det finns möjliga applikationer för denna teknik i allt från kollektivtrafik mellan städer till längdåkningsturer. Det finns till och med förslag om att bygga långa underjordiska rör, suga luften ur rören och placera maglevtåg inuti dem. I denna inställning skulle det i princip inte finnas något vindmotstånd, så ett tåg kunde lätt nå hastigheter som överstiger ljudhastigheten (Thornton, 2007). Även om det kan dröja länge innan denna teknik blir vanligt, är det svårt att förneka att den någon gång kommer att förekomma. Fördelarna är för svåra att ignorera. Från och med nu finns det bara ett kommersiellt maglevtåg i bruk, och det har redan förmörkat allt som har kommit före det. Hur kommer denna teknik att utvecklas och förbättras när vi går in i framtiden? Svaret kommer med tiden. Men det är mycket troligt att vi nu står vid en transportrevolution. För det första ser jag fram emot att glida över landsbygden vid 300 km / h i en svävande låda med magneter.
Bibliografi
Föreslagna länkar
Se även
- Autonoma fordon
- Elektriska batterier för förnybar energi
- Intelligent infrastruktur